「Haptoclone(視触覚クローン)」とは、東京大学大学院新領域創成科学研究科:篠田・牧野研究室によって開発された技術です。離れた場所にいるユーザ同士が互いに触れ合うことができるシステムで、物体の「光で出来たクローン」と「触覚フィードバック」をA地点からB地点へ、B地点からA地点へリアルタイムに共有することができます。
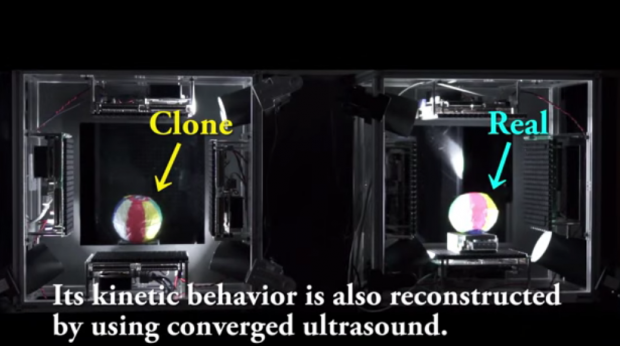
「光で出来たクローン」は、BOXスペース内に内蔵されている2枚のマイクロミラーアレイを使用し光の場をコピーと透過をしB地点へクローンを作り出します。「触覚フィードバック」は、内蔵された1992個の超音波振動子を使用し、赤外線を用いたデプスセンサにより計測した点群をもとに上下左右から発する空中超音波によってB地点へ伝えます。両方共、逆にB地点からA地点へも同じことが可能で、つまり何もないところに光で物体を映し出し、それに触れると感触を実感することができるというわけです。
ただし、触覚フィードバックは、接触圧1平方センチメートルあたり10gf (100 mN) 程度までと微弱なため、それ以上の数値では再現できないとしています。指と指で軽く押し合ったり撫でることは可能でも、力強く握手するなどはできないということです。デモ映像では、紙風船を利用してシステムを実証しています。今はBOXスペース内だけですが、近い将来、人が入れる全身BOXも考えらます。そうすると、VRヘッドセットを装着して触覚フィードバックを伝え合うことなんかも可能になるかもしれません。
今までの触覚フィードバックを振り返ってみるといろいろとあります。手袋系では振動を利用した「Gloveone」、上半身を振動で伝えるスーツ「NullSpace VR」、スーツ系でも「Tesla Suit」は振動と電流、電圧のパルスで伝えていています。他には、電気筋肉刺激と触覚刺激を組み合わせた「IMPACTO」、指を後ろから引っ張る抵抗感で伝える外骨格VRハンドデバイス「Dexmo」、握った時に触れる箇所を4つ互いに動かすことで伝えるグリップ専用「Reactive Grip」、音波を使って空気中に抵抗を与える方法などもあります。