東京大学の研究者らは、1台のハンドヘルドコントローラを用いて、VR内における様々な形状の触覚を再現できるVRハプティクデバイスを発表しました。
論文:Transcalibur: Weight Moving VR Controller for Dynamic Rendering of 2D Shape Using Haptic Shape Illusion
著者:Jotaro Shigeyama,Takeru Hashimoto,Shigeo Yoshida,Taiju Aoki,Takuji Narumi,Tomohiro Tanikawa,Michitaka Hirose
![]()
本稿は、1台のハンドヘルドコントローラから重量と角度を動的に変化させることで、VR内の手持ちオブジェクトの様々な形状の触覚を再現するデバイスを提案します。
提案するプロトタイプは、ウォームギアを介してモータで駆動する角度機構と重量シフト機構の2つから構成されます。
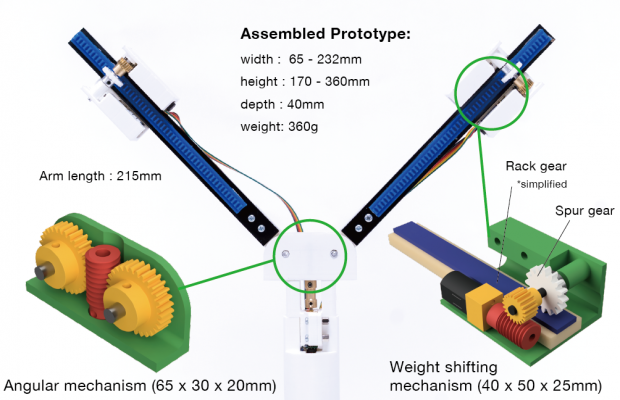
角度機構は、2つのウォームギアを回転させることで2つのアームを開閉することを可能にし、両アームに接続される重量シフト機構は、ウォームギアを回転させることでラックギア上をスライドさせる移動を可能にします。
これらのことで、剣、盾、弓などのさまざまな形状の触覚をVRに合わせて再現することができ、ユーザも1台のコントローラで多様な体感を得ることが可能になります。