ドイツのザールラント大学とIntelの研究者らは、Kinectなどの深度センサーで取得した不完全な(ノイズが多い)3Dデータでも、機械学習を用いて補完したデジタルオブジェクトを作成する提案を発表しました。
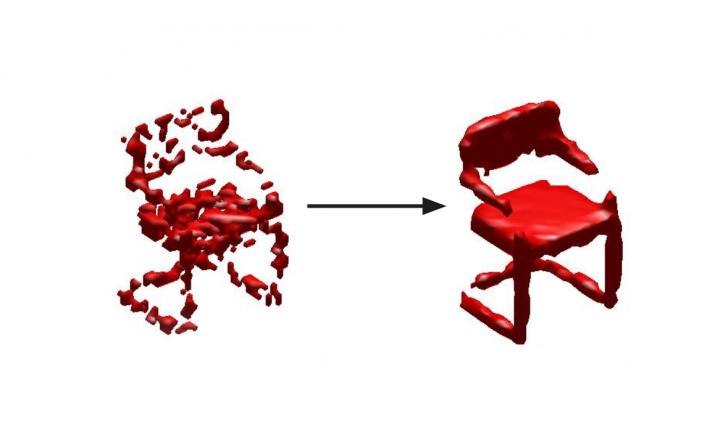
Microsoft Kinectなどの深度センサーは非常に強力ですが、一部でセンサーノイズやオクルージョンなど不完全な3Dデータが生成されます。
そこで、ニューラルネットワークを用いて不完全な3Dデータから複雑な形状分布を学習しオブジェクトを再構成する提案をします。
関連
デューク大学、ロボットが複数の角度から見ることなく物体の見えない部分も推測し何であるかを解釈するアルゴリズムを開発 | Seamless