米ロサンゼルスベースのVRスタートアップ「HypeVR」は、実写ベースの360°VRシーン内を歩き回れる最初のデモ映像を公開しました。
上記映像は、Oculus Rift CV1を使用して360°実写のVRシーン内を移動している様子です。頭部の動きによる1視点だけではなく、VRシーン内を多視点、Outside-in方式の位置追跡ベースで6自由度の動きを可能にしています。低画質なため分かりにくいですが、断崖絶壁でキャプチャした映像内を動き回っている様子を確認できます。奥行きデータを最大100m範囲で記録します。

さらに、同映像を利用してGoogle TangoベースのInside-out方式による位置追跡で実写内を移動している様子も公開されました。こちらは静止画実写ですが、6自由度で移動している様子を確認することができます。
オリジナルVRカメラリグ
撮影機材が特殊です。NEXT VRも使用しているレッド・デジタル・シネマカメラ・カンパニーの「Red Dragon Camera」を14基、そしてGoogleやTOYOTAなどの企業が自動運転カー開発のため使用している全方位レーザーLiDARイメージングユニットVelodyneの「HDL-64e」の下位モデル「HDL-32E」を主軸にしたVRカメラリグです。

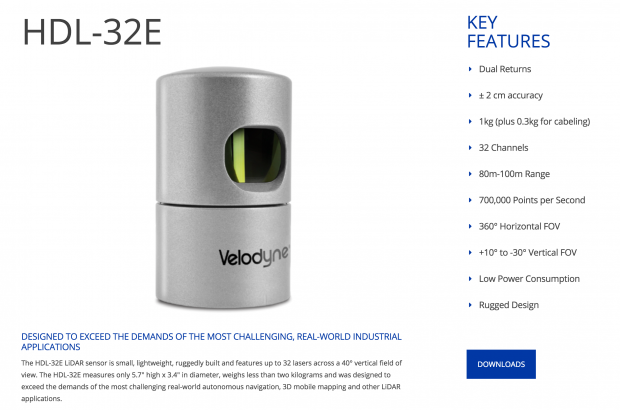
HDL-32Eとは
リグに搭載のHDL-32Eとは、32個のレーザー送受信センサーを内蔵し、水平全方位360°と垂直視野41.3°の3Dイメージングを可能にするマルチチャンネルレーザー測量センサです。秒速70万ポイントを測定し、測定精度約±2cmで測定距離は約100m (1m~100m)まで対応。
自律航法や3Dモバイルマッピングおいて屋内外をサポートする設計になっています。重量1.2kgとし、価格は2万9900ドル(約300万円)。Googleなどが自動運転カーに使用する64個センサーの上位版は3倍ほどの価格がするとか。
Red DragonとHDL-32Eを統合
Red Dragonからの高画質イメージデータと、HDL-32Eからの大規模な3Dマッピングデータを融合、同社特許出願中の独自アルゴリズムを取り入れ、このことにより、360°を6K(90fps)と1秒間に70万ポイントの点群データを最大100mの奥行きで記録し、6自由度の実写によるVRシーン映像を可能にします。

現在、同社特許出願中のキャプチャシステムは、カメラに捉われないとし、今回のカメラリグよりも手頃な価格でコンパクトな3Dカメラキャプチャシステムを開発しているとのことです。同社公式ページはこちら。
実写とVRと位置追跡
実写ベースのVRによる位置追跡で動きまわる体験を可能にしたシステム・アプローチは、過去にもいくつかありました。
それぞれ、リンク先の過去記事をご参照ください。