ヒューストン大学などによる研究チームは、伸縮性のあるウェアラブル電子パッチを皮膚に貼ってロボットハンドを制御する技術を発表しました。
Kyoseung Sim1, Zhoulyu Rao1, Zhanan Zou2, Faheem Ershad3, Jianming Lei4, Anish Thukral4, Jie Chen4,5, Qing-An Huang5, Jianliang Xiao2 and Cunjiang Yu1,3,4,6,*
1Materials Science and Engineering Program, University of Houston, Houston, TX 77204, USA.
2Department of Mechanical Engineering, University of Colorado, Boulder, CO 80309, USA.
3Department of Biomedical Engineering, University of Houston, Houston, TX 77204, USA.
4Department of Mechanical Engineering, University of Houston, Houston, TX 77204, USA.
5Key Laboratory of MEMS of the Ministry of Education, Southeast University, Nanjing, Jiangsu 210096, China.
6Department of Electrical and Computer Engineering and Texas Center for Superconductivity, University of Houston, Houston, TX 77204, USA.

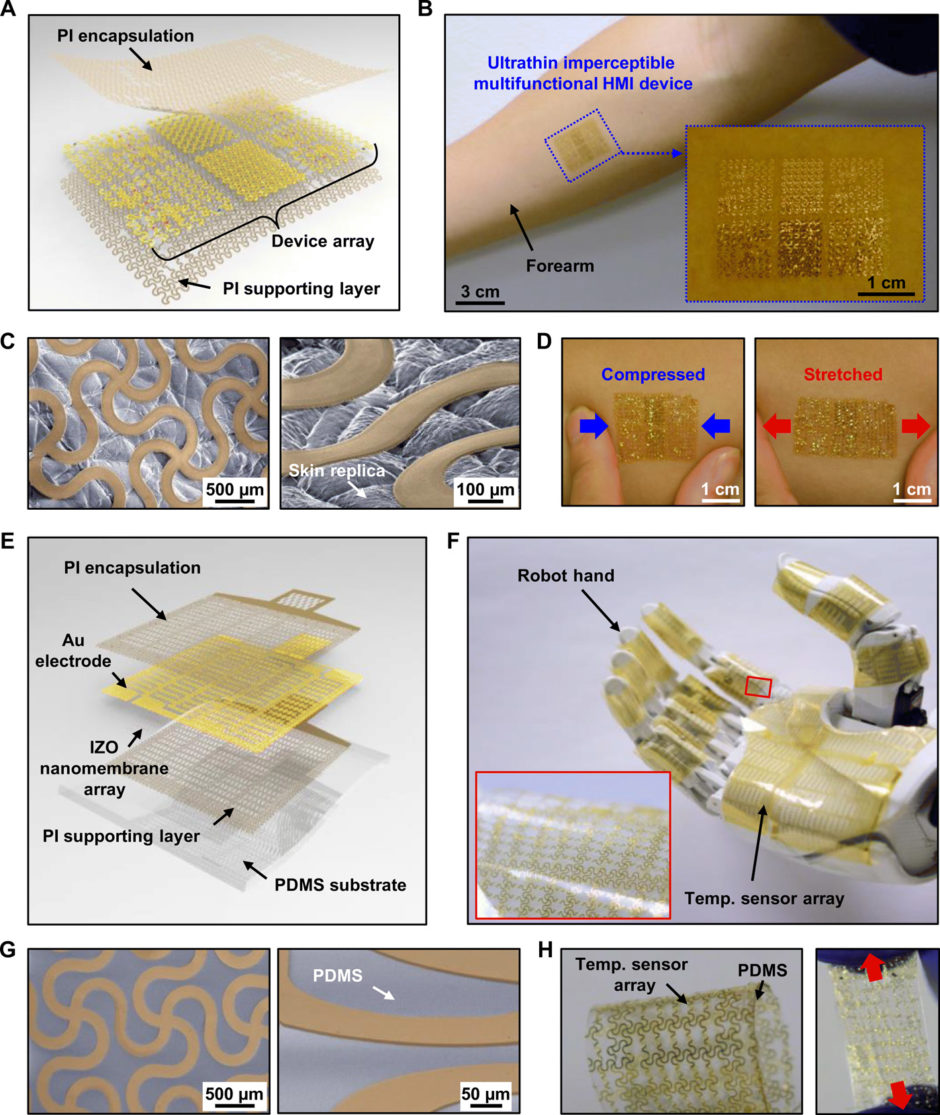
本研究は、皮膚に電子パッチを貼ることでロボットなどを操作するウェアラブルヒューマンマシンインターフェイス(HMI)を提案します。伸縮性のある電子パッチはフォトリソグラフィーを用いた構造で、厚さ50nmの電気伝導体、インジウム・亜鉛酸化物、ポリイミド、SU-8などから構成されます。
実験では電子パッチを手の甲に装着し、ロボットハンドを制御します。デモ映像でも確認できるように、グーパーの動きを追従し制御に成功します。またロボットハンドから人間に温度フィードバックも送信することができ、ロボットハンドが感じる熱を人の手に返すことを可能にします。