KAISTとMicrosoft Researchによる研究チームは、3本の指とヴァーチャルオブジェクトの相互作用による触覚を再現するハンドヘルドコントローラ「TORC(TOUch Rigid Controller)」を発表しました。
論文:TORC: A Virtual Reality Controller forIn-Hand High-Dexterity Finger Interaction
著者:Jaeyeon Lee, Mike Sinclair, Mar Gonzalez-Franco, Eyal Ofek, and Christian Holz
所属:HCI Lab, School of Computing, KAIST, Microsoft Research
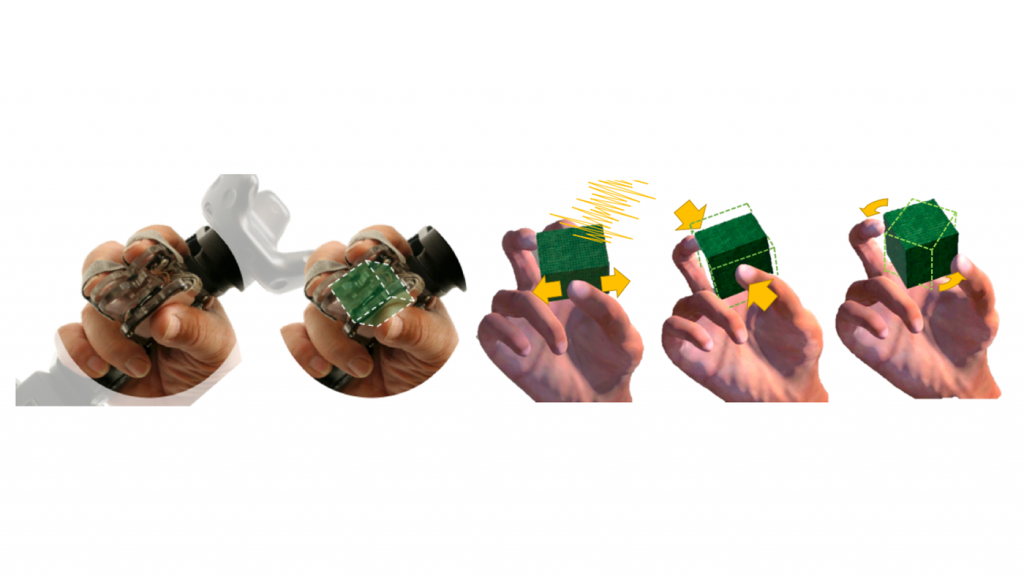
本論文は、親指と2本の指を使ってヴァーチャルオブジェクトの触覚を再現するデバイスを提案します。デバイスは、力覚センサとVCA(Voice Coil Actuator)方式の振動アクチュエータをベースに設計します。
デバイスを右手の親指と人差し指、中指で持ち、残りの指でハンドルを握ります。親指含む3つの指で握ることで、ヴァーチャルオブジェクトとリアルタイムに対話します。また、静電容量式平面トラックパッド上で親指をスライドさせヴァーチャルオブジェクトを回転させたりを可能にし、同時にレンダリングされた振動は、テクスチャや弾性などのオブジェクト特性を表現します。
実験では、ヴァーチャルオブジェクトを掴んだり離したりする他に、ゴムボールのような弾性物体の柔らかさを表現したり、鍵を鍵穴に差し込んで回すシミュレーションを表現したりを実証します。