ソウル大学校と盆唐ソウル大学校病院による研究チームは、人の動きを284~346の筋腱ユニットで動作させるdeep learningを用いた物理シミュレーションを発表しました。
論文:Scalable Muscle-actuated Human Simulation and Control
著者:Seunghwan Lee, Kyoungmin Lee, Moonseok Park, Jehee Lee
所属:Seoul National University, Seoul National University Bundang Hosiptial
人間の動きは、骨の形状や筋肉の状態など、多くの解剖学的要因が相互作用して影響を与えます。本論文では、より現実的な人間の動きを構築するため、それら要因を考慮した最大346の筋腱ユニットの筋収縮で駆動する全身筋骨格モデルとその制御システムを提案します。
本提案の筋骨格モデルは、骨と接続した8つの回転関節(膝と肘など)と14の臼状関節(腰、足首、肩、手首など)含む骨格筋に対応する284~346の筋腱ユニットで構成されます。モデルには指はありませんが、2つのバージョンの足モデル(2本指とマルチセグメント)があります。2本指用は3つのセグメントを持つように単純化されており、マルチセグメントの足は足ごとに12の回転関節と31の筋肉が追加されます。 骨格運動に寄与しない筋肉は省略します。
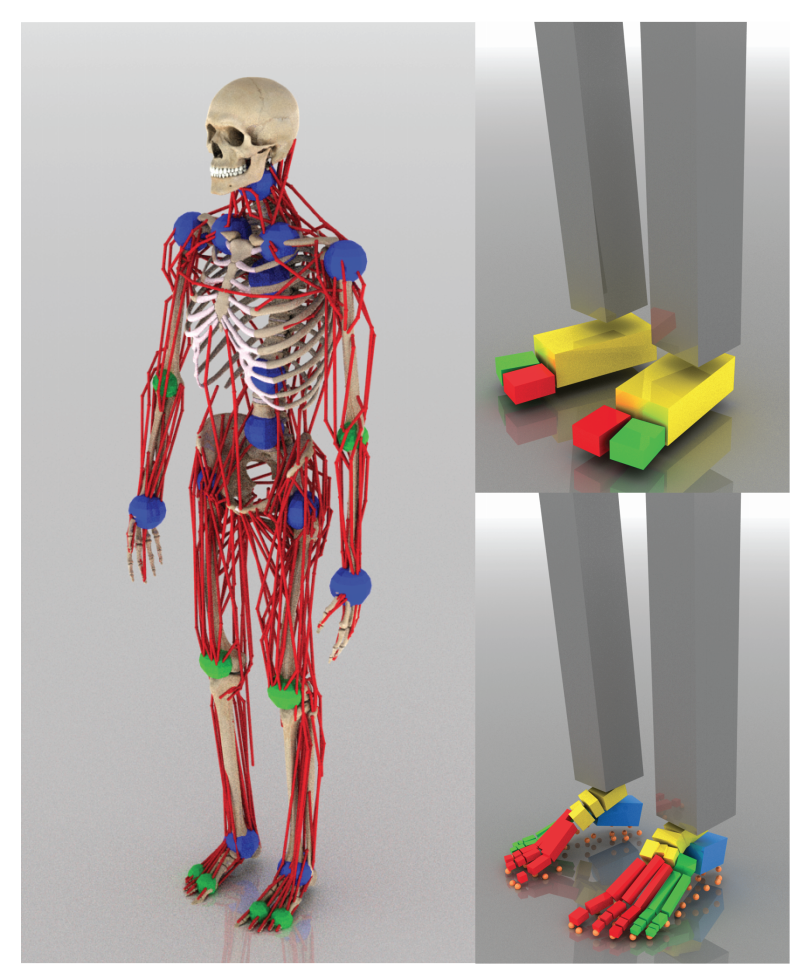
左:284~346の筋腱ユニットで構成される全身筋骨格モデル。右上:2本指型の足。右下:マルチセグメント型の足。
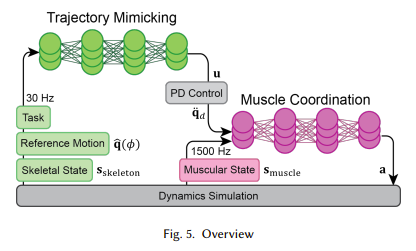
ネットワークは、追加のタスク目的を達成しながら、参照データに類似した動作を生成する制御ポリシーを模倣学習します。ネットワークは2段階で構成され、骨格層は低いフレームレートで関節運動する骨格運動の運動学とダイナミクスを学習し、筋肉層はより高いフレームレートで筋肉の活性化を学習します。ネットワークの構築には、オープンソースのPython機械学習ライブラリ「Pytorch」を使用し、模倣ポリシーはProximal Policy Optimization (PPO)を用いて訓練されます。
これにより、人の動きを物理シミュレーションでより自然に再現することを可能にします。論文では、歩く走る飛ぶなどの運動スキルが実験され、更に義足を使用して歩く走る踊るといったシミュレーションも実験されます。よりリアルな再構築を可能にする一方で、計算コストは高く、50自由度をもつ骨格モデルに比べて約3倍から4倍の計算が必要です。