MITの研究チームは、未知の環境をドローンが自律飛行するためのリアルタイム・フレームワークを発表しました。
論文:Real-Time Planning with Multi-Fidelity Models for Agile Flights in Unknown Environments
著者:Jesus Tordesillas, Brett T. Lopez, John Carter, John Ware, Jonathan P. How
所属:Massachusetts Institute of Technology
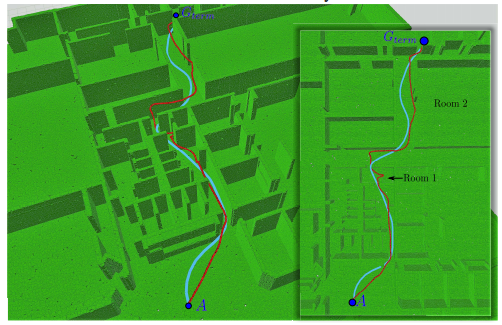
青の軌道:全体の地図が分かっている最適ルート。赤の軌道:全く新しい環境で飛びながらルートを模索したルート。
本論文は、ドローン(無人航空機)を用いて、未知の環境を自律的に飛ぶ為の高速マッピングと計画を実行するための新しいフレームワークを提案します。スタートからゴールまで、障害物を回避しながらより高速かつ最短で飛行することを目的とします。
自律飛行で使用されるアルゴリズムに、グローバルとローカルを計算し組み合わせて最終的な経路を導きだすアプローチがあります。本提案手法は、その組み合わせにおいて、グローバルとローカルで発生する負の相互作用(不安定さ)を軽減したフレームワークを提案することで、より高速で精度の高い飛行経路計算を実行します。
実験の機体は、本体にQualcomm R SnapDragon Flight、そこにNvidia R Jetson TX2とIntel R RealSense Depth Camera D435を搭載します。シミュレーションで検証した結果は、未知の環境での再計画時間5〜40ミリ秒と、同様の最先端アルゴリズムよりも3〜30倍高速と報告します。