チューリッヒ工科大学、ミュンヘン工科大学、スタンフォード大学の研究者らは、ドローン(無人航空機:UAV)を用いて、屋外の建物規模を航空3Dスキャンするための視点と経路を計算するアルゴリズムを発表しました。
論文:Plan3D: Viewpoint and Trajectory Optimization for Aerial Multi-View Stereo Reconstruction
著者:Benjamin Hepp, Matthias Nießner, Otmar Hilliges
本論文は、単一のRGBカメラを備えたドローンで屋外環境をキャプチャし、高品質な3D再構成のための視点と安全な経路計画を効率的に計算するエンドツーエンドのフレームワークを提案します。
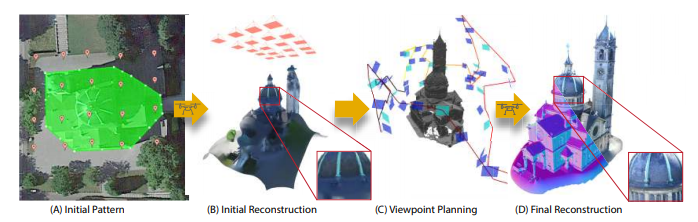
上図(A)のように、ユーザは、マップ上で関心領域(緑色)を定義し、安全な高度で飛行する視点(オレンジ色)のペアを指定します。ユーザーが指定した関心領域に加えて、他の建物や電線を避けるなどの飛行禁止エリアを指定することも可能です。
取得した画像から、初期再構成および占有マップを取得し、視点および経路を計算します。新たに取得した画像からSfM-MVSパイプラインを介して処理し、高品質な3Dモデルを再構築します。

本提案手法は、知識がないユーザでも作成できるように自動化しており、初心者でも未知の領域を自動的に探索し関心領域である建物規模の屋外シーンの再構築を可能にします。論文内では、協会から近代建築の建物まで、様々なシーンを使って、本提案手法の多様性を実証しました。