イェール大学や香港科技大学などによる研究チームは、鳥やコウモリのように平坦でない場所でも一時的に止まることができる足とかぎ爪をカスタマイズしたドローン(無人航空機)システムを発表しました。
論文:Perching and resting—A paradigm for UAV maneuvering with modularized landing gears
著者:Kaiyu Hang, Ximin Lyu, Haoran Song, Johannes A. Stork, Aaron M. Dollar, Danica Kragic and Fu Zhang
所属:Department of Mechanical Engineering and Material Science, Yale University, New Haven, CT, USA. Hong Kong University of Science and Technology, Hong Kong, China. RPL, KTH Royal Institute of Technology, Stockholm, Sweden.The University of Hong Kong, Hong Kong, China.
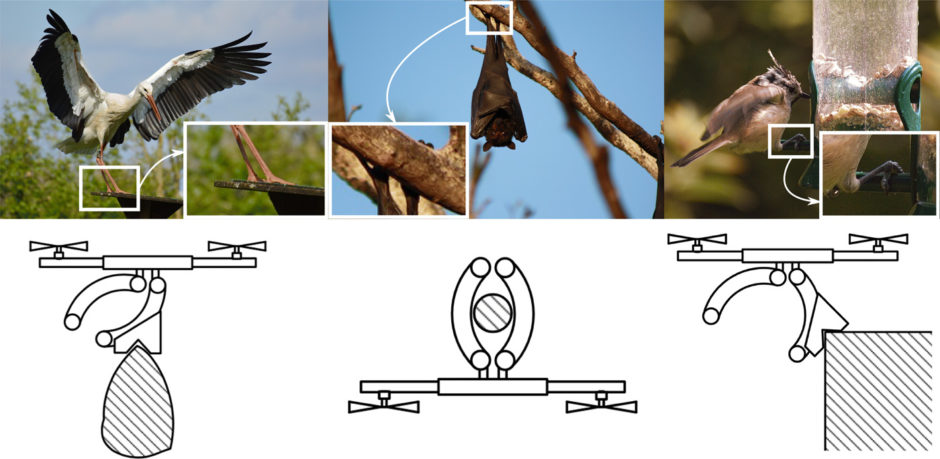
鳥やコウモリなどの動物は、エネルギーを節約するために、木の枝や建物の端や角など不安定な場所にでもかぎ爪を駆使して止まり休憩をします。ドローンも同じく、バッテリを節約するために、平坦でない場所に止まることは有益なことです。本論文は、そんな困難な場所に止まれるように、特殊なかぎ爪付き足を3本装備したドローンを提案します。
本提案は、鳥やコウモリが木の枝や建物などに止まって休む足とかぎ爪の構造や止まり方を参考にしたアプローチを検討します。止まり方は、下図のように何かの端に止まったり、木の枝に捕まってぶら下がったり、何かの上に半ホバリングで留まるなどです。
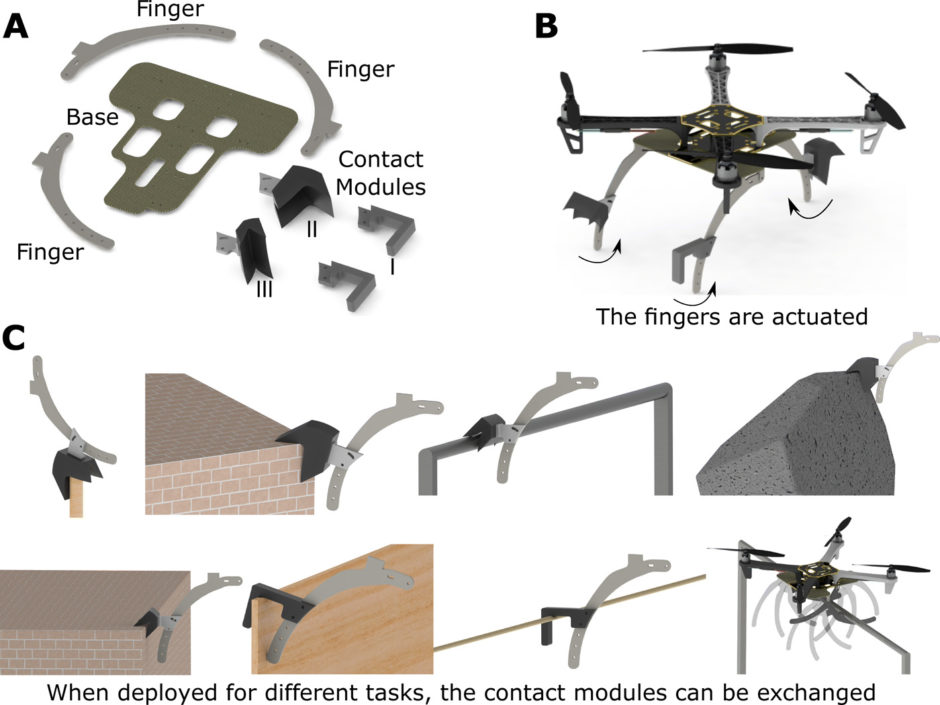
ドローンの構造は、3つの足のような作動式グリッパーモジュール(足部分)と、各先端に装備するコンタクトモジュール(かぎ爪部分)で構築されます。コンタクトモジュールは、様々な場所の形状に対応できるように3種類用意されています。
そして、ドローンが周囲を認識するためにデプスセンサ(実験ではKinectと実験室環境を事前スキャン)を用いて環境を検出し、止まれるかどうかを判断し接触位置を決定します。位置を検出するためにPCL(Point Cloud Library)を用いています。まず、止まったことのある場所を点群データを使用したテンプレートからマッチングによって検出します。決定すると、次に衝突を回避して上から安全に止まりにいけるかを確認し実行します。

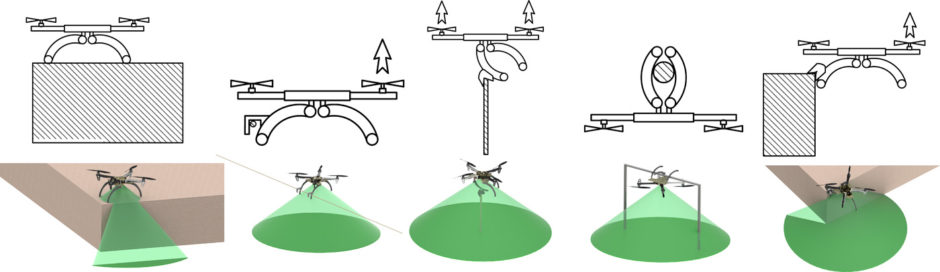
様々な止まり方を可能にします。下図のような代表的な例を見て行きましょう。左から平坦に着陸する、棒に引っ掛けて掴む(片方のプロペラを作動させバランスを調整)、棒の先端に乗る(ホバリングでバランスを調整)、棒を掴みぶら下がる、箱の端に掴まる(片方のプロペラを作動させバランスを調整)。
まとめると、ドローンに整備した足とかぎ爪のモジュールにより様々な対象物へのアプローチを可能にし、その対象物に止まっても大丈夫なのかの位置決めをセンサからの情報を元に決定し、そして継続して止まれるようにする姿勢制御によるバランスの維持を行う、これらのことで困難な場所でも途中で休息(完全にモーター停止もしくは電力を抑える)しバッテリを節約することを可能にします。