東京大学とJSTさきがけによる研究チームは、手で掴んだ仮想スティックを物体に衝突させた際の触覚を再現するハンドヘルドVRデバイス「PaCaPa」を発表しました。
論文:PaCaPa: A Handheld VR Device for Rendering Size, Shape, and Stiffness of Virtual Objects in Tool-based Interactions
著者:Yuqian Sun, Shigeo Yoshida, Takuji Narumi, Michitaka Hirose
所属:The University of Tokyo, JST PRESTO Tokyo, Japan

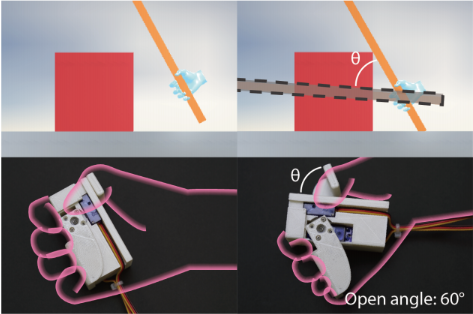
本論文は、仮想スティックを使用した際の触覚を再現するハンドヘルドデバイスを提案します。棒で硬い箱を叩いた際、手のひらや指に振動や圧力がかかると思いますが、この触覚を振動を用いることなく再現するのが本デバイスです。具体的には、ユーザの手を軸として移動しようとしているのとは反対の方向に回転しているように感じる触覚を再現します。
デバイスは、開閉する部分(翼と呼ぶ)を2つ搭載する直方体の機器です。手で握ることで使用し、この翼を開閉することで接触力および接触角を生成します。開閉部分の調整は、仮想スティックの方向と手の方向との間の角度に基づいて決定し、サーボモータにより0〜90度の範囲で開閉します。
本提案を用いることで、様々な仮想オブジェクト特性を表現することができます。サイズの違いや形状の違い、硬さや弾力性などの剛性特性をレンダリングすることが可能です。これらを駆使したアプリケーションでは、モグラ叩きと刀で巻藁を切るゲームが実装され、デモ映像で確認することができます。