シリコンバレーに拠点を置く非営利団体「OpenAI」は、より器用な動きでキューブを手のひらで操るロボットハンドシステム「Dactyl」を発表しました。

Dactylは、Shadow Robot社が造るロボットハンド、そして、ロボットハンドの周囲に3台のRGBカメラとPhaseSpaceの3Dモーションキャプチャシステムを整え実行します。
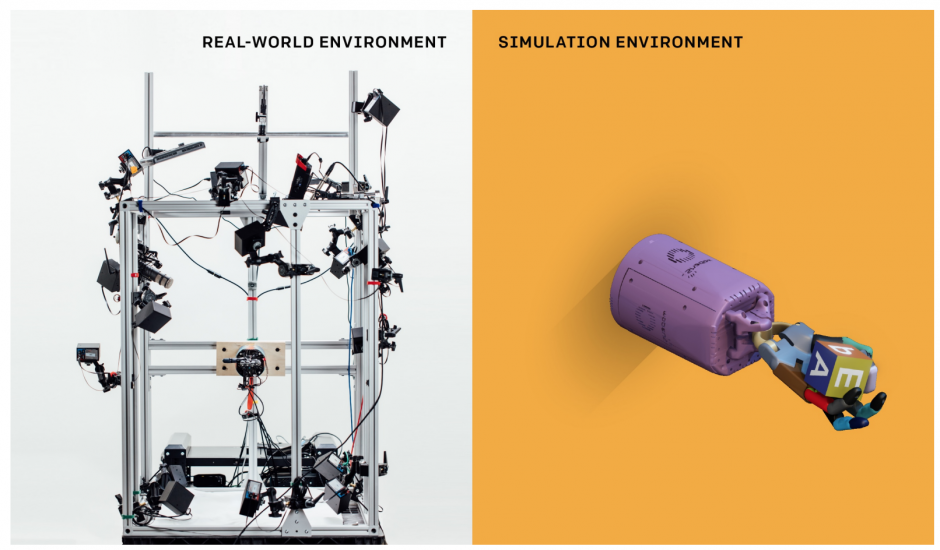
(左:中心にロボットハンドが設置してあり、周囲にカメラ類が整備してある。右:シミュレートされた環境)
トレーニングには、OpenAI Fiveと同じ強化学習アルゴリズムとコードを用いて、ランダム化する仮想環境の中で学習します。RNN(Recurrent Neural Network)と強化学習を用いて観測値を行動にマッピングすることを学習し、CNN(Convolutional Neural Network)を用いて画像から物体の姿勢を推定することを学習する。

最後は、カメラからオブジェクトの姿勢を予測し、3Dモーションキャプチャシステムを使用してロボットの指先の位置を測定、これら両方を制御ポリシに与えてロボットの動作を生成します。
これらのことで、仮想環境で学んだ手の技能が、物理環境の5本指ロボットでより器用な動きをもたらし、実験では、キューブの配置を特定の向きに変更するよう依頼するテスト下で、指先を滑らかに動かしながら50回連続でクリアした結果を報告します。