サクレー大学とSorbonne Universityの研究者らは、モバイルデバイスに装着し使用する5自由度の小型ロボット「MobiLimb」を発表しました。
論文:MobiLimb: Augmenting Mobile Devices with a Robotic Limb
著者:Marc Teyssier, Gilles Bailly, Catherine Pelachaud, Eric Lecolinet


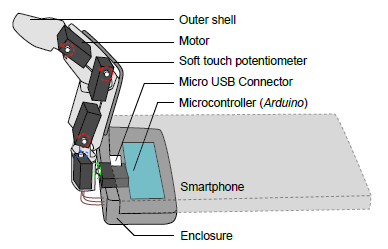
MobiLimbは、5つの回転関節を持つロボットマニピュレータで、アクチュエータ、センサ、電子機器、コントローラから構成されています。
アクチュエータは、170°回転できる5台のPZ-15320サーボモータが備わっており、スマートフォン(130g)の重量を支えるのに十分な力を生成したり、関節の動きを連続的に行います。
Arduino Leonardo Pro Microは、スマートフォンの背面に取り付けられます。電力は、マイクロUSBコネクタで取り出すため、追加のバッテリを必要としません。
これらの機能で、MobiLimbは多様なことができます。例えば、スマートフォンをテーブルの上に斜めに立てかけたり、グリップとして持ったり、通知(ノーティフィケーション)を知らせてくれたり、仮想オブジェクトや物理オブジェクトのコントローラとして使用したり、自ら移動したり、触覚フィードバックを与えてくれたり、他にもさまざまな使い方ができ、一部をデモ映像で確認することができます。