群馬大学 奥研究室による研究チームは、平行に設置した2台のプロジェクタから3次元の距離情報を取得し、その情報を基に投影する高速かつ高精度なマーカーレス動的プロジェクションマッピング法を発表しました。
論文:2 台の平行設置プロジェクタによる高速かつ高精度な三次元計測情報手法を用いた動的プロジェクションマッピング
Dynamic Projection Mapping using High-Precision and High-Speed Three Dimensional Measuremen by Two Projectors Placed in Parallel
木島広夢 / Hiromu KIJIMA(群馬大)(Gunma University)
奥寛雅 / Hiromasa OKU(群馬大)(Gunma University)
本論文は、2台の平行設置プロジェクタによる「構造化ライトフィールド法(Structured Light Field,SLF)」を用いて対象の距離を測定し、その3次元情報に基づく動的プロジェクションマッピングを提案します。
構造化ライトフィールド法とは、距離に応じて模様が変化する特殊な光を投影することで、距離と一対一対応の模様から距離情報を推定する手法です。本提案は、この原理を用いて2台のプロジェクタを平行に垂直方向と水平方向へ同じ距離だけずらして設置することで距離情報を取得します。具体的には、平行に設置した2台のプロジェクタから投影される縞画像からコントラスト量を計測し、距離情報を推定します。取得した情報を基に指令値を算出し、受信した簡易レーザープロジェクタが指令値をリアルタイムに反映することで、動的物体へのプロジェクションマッピングを可能にします。
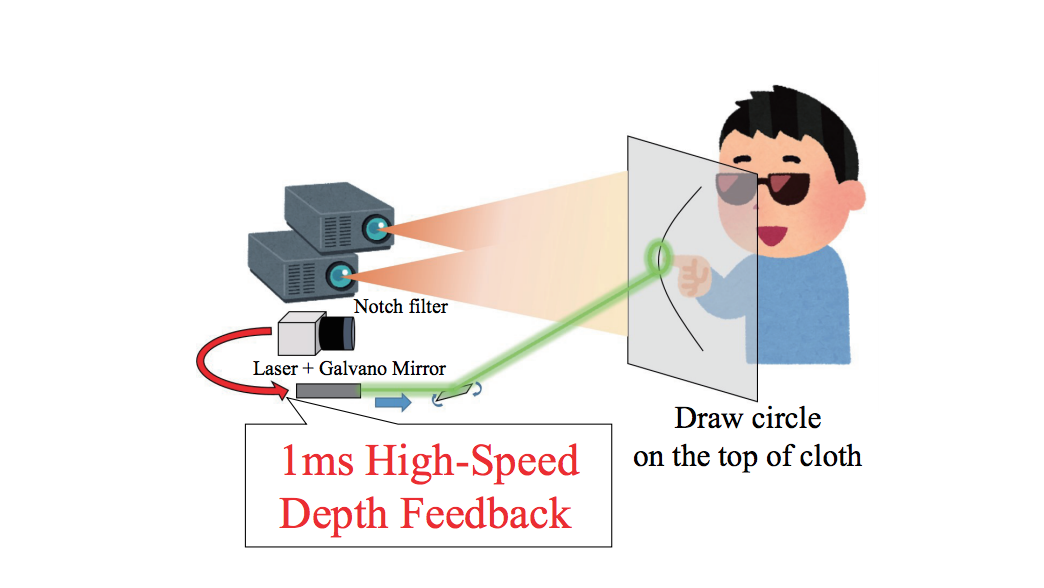
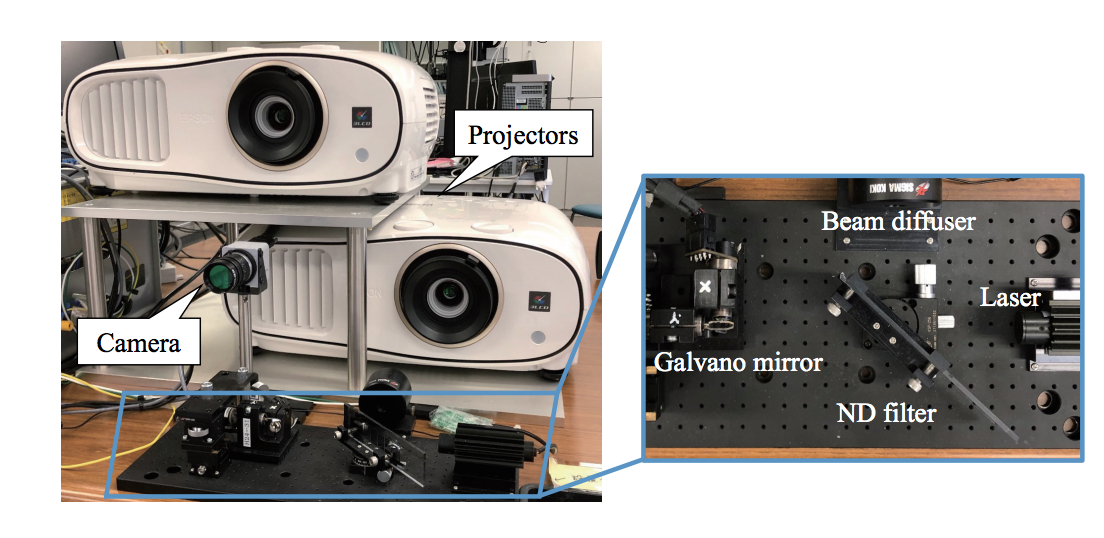
実験では、布を四角い枠に張り、後ろから指で押した際の3次元情報を取得し、押した箇所にレーザーで四角を描画します。四角のサイズは押し込んだ量に比例します。結果として、後ろから押している布の指を高速に動かしても位置を正確に捉え描画し続けることができました。また投影される縞画像をカメラで取得後、1ms以内で簡易レーザープロジェクタに描画の指令値を送れたこと、しかもmm程度の僅かな押し込みも検出できたことから、高速かつ高精度な距離推定が可能であることを実証しました。