ミシガン大学の研究チームは、自動運転車において、現在の技術よりも高い精度で歩行者の動きを認識および予測するシステム「Bio-LSTM」を発表しました。
著者:Xiaoxiao Du, Ram Vasudevan, Matthew Johnson-Roberson
所属:University of Michigan
自動運転車において、移動する周囲の人の動き、歩行者がどこへ向かうのかという予測は車と人との相互作用において、非常に重要な課題の1つです。この機能により、車両は衝突を回避し、乗り心地と安全性を向上させることができます。
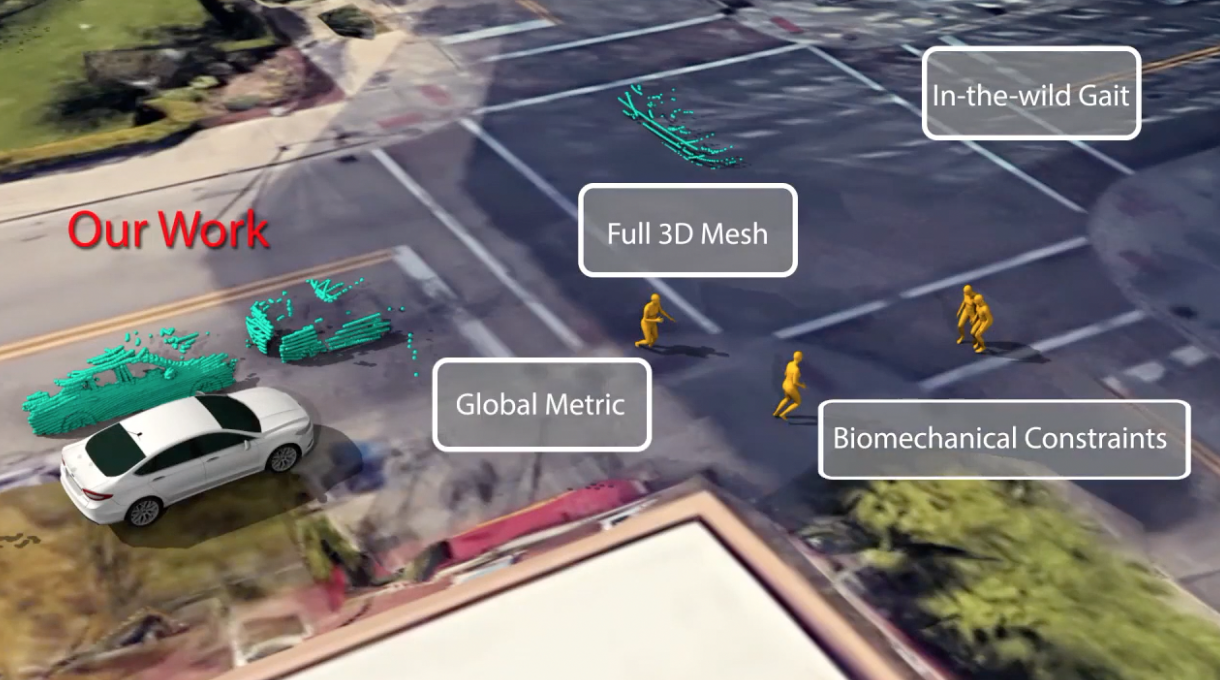
そこで、本論文では、グローバル座標系における歩行者の位置と3D多関節体姿勢を予測することができるbiomechanically inspired recurrent neural network「Bio-LSTM」を提案します。提案されたネットワークは、車両のカメラやLiDAR、GPSからのデータを入力として受け取り、次のステップの位置とSkinned Multi-Person Linear(SMPL)モデルパラメータで表される歩行者姿勢の全身3Dメッシュを出力します。
本アプローチを行うにあたって重要なのは、人間の歩行ペース(周期性)、四肢の鏡面対称性、および足の配置(地面反力の変化)を把握する事、人体の物理的な制約(飛ぶことができない、歩いている最速のスピードなど)を適用する事、これらを駆使して次の動きを予測するための選択肢の数を減らし精度を高めます。
本ネットワークを活用する事で、都市交差点スケールにおいて、車両カメラから45メートルまでの歩行者(1人もしくは複数)のポーズと位置を同時に予測することを可能にしました。
実験では、歩行者の多い都市交差点で収集された大規模なデータセットであるPedXデータセットについての予測結果を示します。結果、野外(交差点)で複数の歩行者の歩行および姿勢の予測をより正確に生成しました。車から最大7メートル離れた位置の予測で、予測の中央値誤差は、1秒後に約10 cm、6秒後に80 cm未満でした。これにより、自動運転車周囲の歩行者(1人または複数)の体がどう動くかの次のステップと、次の場所を予測することをより正確に認識することを可能にします。