慶應義塾大学大学院 メディアデザイン研究科による研究チームは、身体機能の拡張のため、脊椎動物の尻尾を模倣したウェアラブルロボットテールデバイス「Arque」を発表しました。本研究は、身体性メディアプロジェクト「Embodied Media」によるものです。
論文:Arque: Artificial Biomimicry-Inspired Tail for Extending Innate Body Functions
Junichi Nabeshima(Keio University Graduate School of Media Design)
MHD Yamen Saraiji(Keio University Graduate School of Media Design)
Kouta Minamizawa(Keio University Graduate School of Media Design)

本論文は、生物の構造を理解し仕組みやデザインを真似るBiomimicry(バイオミミクリ)に触発された尻尾装置を提案します。脊椎動物において、尾部は移動に使用したり、周囲把握に使用したり、社会的シグナルに使用したり、身体の平衡感覚を制御したりと能動的な機能をもちます。その中でも、身体バランスを維持する機能に着目し、装着することで転倒や損傷から身を守ることを目的とした尻尾装置を検証します。
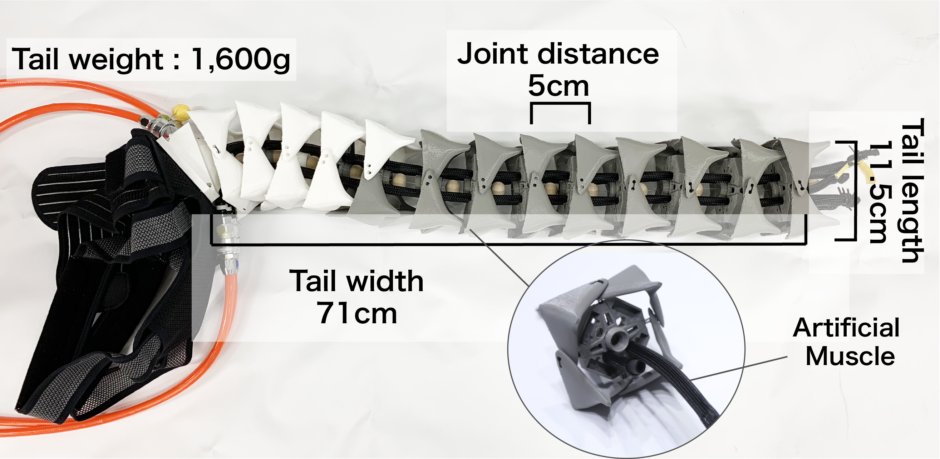
提案装置は、タツノオトシゴの骨格構造をベースに模倣します。本体は複数の関節部を互いに連結する構造で、各関節は4つのプレートとバネ、1つの椎骨で構成され、また4つの空気圧式人工筋肉アクチュエータが埋め込まれています。この空気圧式人工筋肉アクチュエータをエアコンプレッサで駆動させ、8つの異なる方向に沿って尾部を制御します。本体全体は身体バランスの維持において、運動量(体重の約5%)を変化させるのに十分な重量を有しており、長さをカスタマイズすることで重量を調整しさまざまな体重に対応します。
使用時には装置をユーザの腰部に取り付けます。 ユーザの上半身に装着した身体追跡装置が重心を推定し、それに応じて尾部を作動させます。前に屈むと後方に尾部が上がり、横に傾くと逆方向に尾部が上がり、これらの動きで全身運動のバランスをサポートします。さらに、ヴァーチャルにおいて強い風に吹かれている感覚を与えたりといった触覚/力覚フィードバックも提供します。