パデュー大学による研究チームは、3Dプリンタを用いて容易にソフトロボット部品を生成できる設計法を発表しました。
論文:3D‐Architected Soft Machines with Topologically Encoded Motion
著者:Debkalpa Goswami, Shuai Liu, Aniket Pal, Lucas G. Silva, Ramses V. Martinez
所属:Purdue University
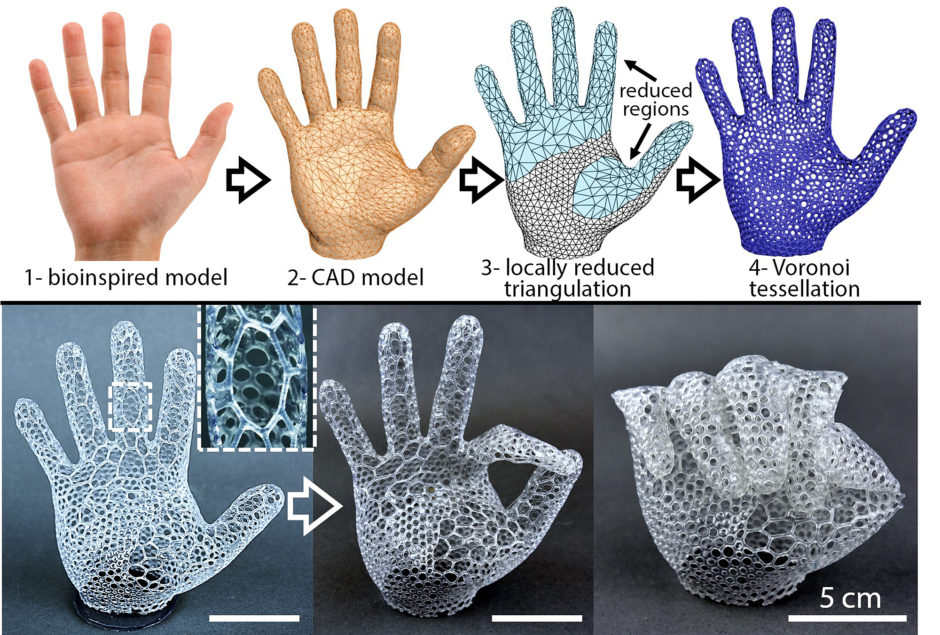
本論文は、3Dプリンタを使用してソフトロボット部品を効率的に設計および製造する方法を提案します。提案手法は、Voronoi tessellationと付加製造を組み合わせて、低密度の3D architected soft machine (ASM)を生成します。
ユーザは、任意の形状のCADモデルを作成し、関節がどの方向に動くかを設定後3Dプリント可能なASMに変換します。作成したASMは、超高圧縮(400%)と伸張(500%)の後でさえも元の形状に回復する必要な弾性を持ち合わせます。本手法により、軽量で柔軟なASMを容易かつ安価に作成することを可能にします。