スタンフォード大学の研究者らは、人間の皮膚に似た感覚を検出できるe-skinを用いて、ロボットに触覚を与える電子手袋を発表しました。
論文:A hierarchically patterned, bioinspired e-skin able to detect the direction of applied pressure for robotics
著者:Clementine M. Boutry, Marc Negre, Mikael Jorda, Orestis Vardoulis, Alex Chortos, Oussama Khatib, Zhenan Bao
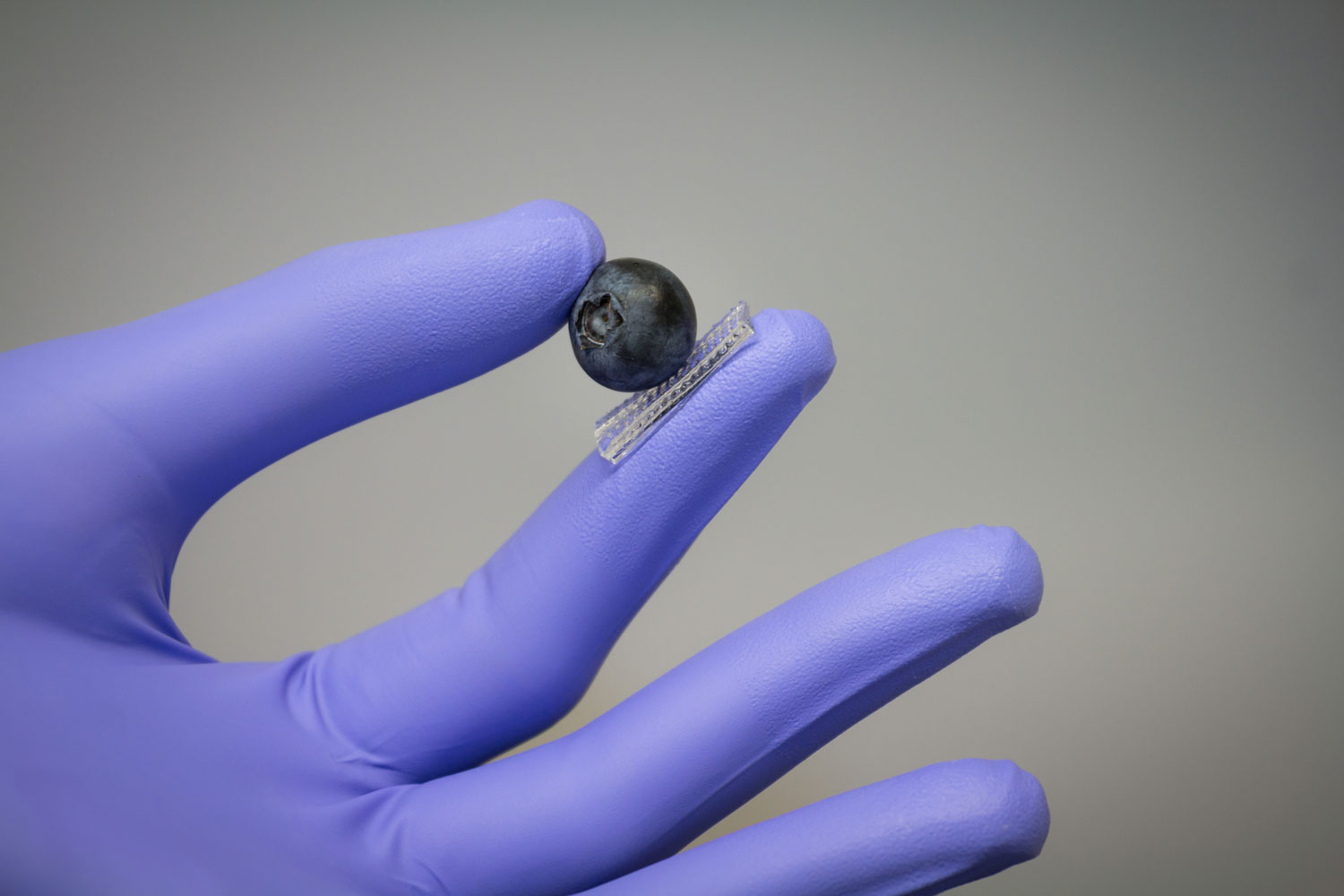
ブルーベリーを潰すことなく掴むことができる。Credit: Amir Foudeh, Clémentine Boutry, Marc Nergre, Zhenan Bao of Stanford University.
本論文は、ロボットハンド向けに、人間の皮膚感覚を模倣したe-skinによる電子手袋を提案します。電子手袋の指先の各センサは、有棘層のように凹凸構造にしたりなど3つの層で構成されており、圧力の強さと方向を同時に測定します。電子手袋を着用したロボットは、親指と人差し指で卵を握ったり、滑らせたりすることなく卵をつかむことができたり、下GIFのように、柔らかい物体に対して潰すことなくタッチすることを可能にします。

ラズベリーに優しくタッチすることができる。Credit: Amir Foudeh, Clémentine Boutry, Marc Nergre, Zhenan Bao of Stanford University.
デモ映像では、せん断力を検出することで、ピンポン玉を押しつぶすことなく掴んで持ち上げることを実証しました。将来的には、手袋形式ではなく、すべての指と手のひらに埋め込む形式で、人間の皮膚を模倣した生物学的電子センサを備えることが目標と述べます。また、究極の目標は、事前プログラミングなしでオブジェクトを安全に取り扱う自動制御を開発することだとしています。