カールスルーエ工科大学とカーネギーメロン大学などによる研究チームは、器用で柔らかいロボットハンドシステムを発表しました。
論文:Control of Tendon-Driven Soft Foam Robot Hands
著者:Cornelia Schlagenhauf, Dominik Bauer, Kai-Hung Chang, Jonathan P. King, Daniele Moro, Stelian Coros, Nancy Pollard
所属:Karlsruher Institut für Technologie, Carnegie Mellon University, Boise State University, ETH Zurich
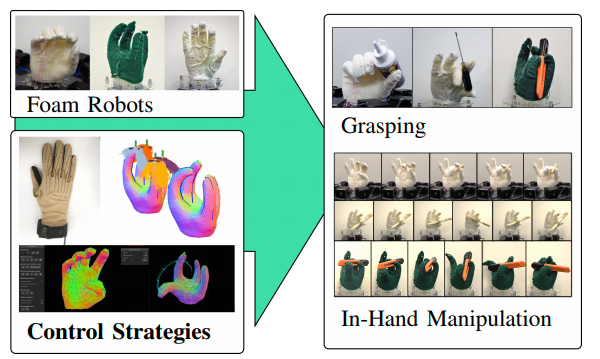
本論文は、直感的制御により安定した握りと正確なハンド内操作を実行できるロボットハンドを提案します。本ロボットハンドは、柔らかさを追求するため、手自体には腱(PTFEチューブを使用)の箇所含め柔らかい素材だけで作成しており、すべての剛性部品(腱を駆動するためのモーターとプーリーなど)は手から離して収納しています。
制御手法にあたる動きの学習には、指の動きを関節レベルでリアルタイムに計測する22のセンサからなるグローブ「CyberGlove」を用いて、22の関節角度を入力に、対応する腱作動を予測する回帰モデルを訓練します。120種類の手のポーズのトレーニングデータセットを構築しました。
結果、高精度で様々なポーズを再現することができ、また、器用に物体を握る動作も正確に実行することができました。デモ映像では、テニスボールを握ったり、ストローやお箸、ハサミなどを持って動かしている様子を確認することができます。