ポツダム大学の研究者らは、リアルウォーキングVR体験において、物理空間に依存しない設計ができるツール「Scenograph」を発表しました。
論文:Scenograph: Fitting Real-Walking VR Experiences into Various Tracking Volumes
著者:Sebastian Marwecki, Patrick Baudisch
本ツールは、特定のサイズと形状の追跡エリアを設計する代わりに、追跡エリアとは独立した体験を設計者が指定することができます。物語の構造を維持しながら、場所を小さなものに分割することによって、所与のサイズおよび形状の追跡エリアに体験をインスタンス化します。
どのような追跡エリアでも、体験ベースで再構築することで、物理空間を効率的に、かつ重要である物語のエクスペリエンスを損なうことなく提供することができるとしています。
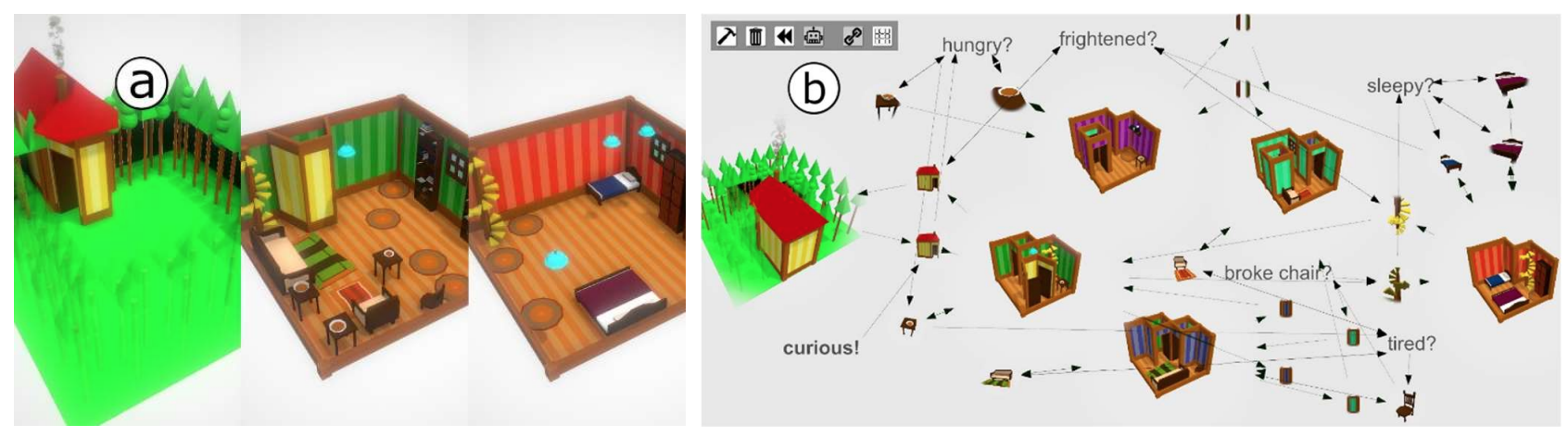
上図では、おとぎ話「Goldilocks」を例として用いています。本来、25平方メートルのシーンが3つあります(a)が、これをL字型の8平方メートルのシーンを複数加えて6つのシーンに分割します(b)。物理空間を狭くしているのに、体験は維持します。
このことで、トレッドミルやテレポート、リダイレクトウォーキングなどを用いることなく、狭い物理空間を持つユーザに対して、物理的動作と仮想的動作の1対1のマッピングにおけるVR体験を提供することができます。