コロラド大学ボルダー校(CU-Boulder)の研究者らは、ドローン(無人空中ロボット)から見える景色をARで可視化することで遠隔操作を改善するアプローチを発表しました。
論文:Improving Collocated Robot Teleoperation with Augmented Reality
著者:Hooman Hedayati, Michael Walker, Daniel Szafir

本稿は、ドローンをサポートするARインターフェースのフレームワークを提案します。提案手法を用いることで、ドローンのカメラからキャプチャした視覚をHMDを通して直感的で視覚的なARフィードバックを提供します。
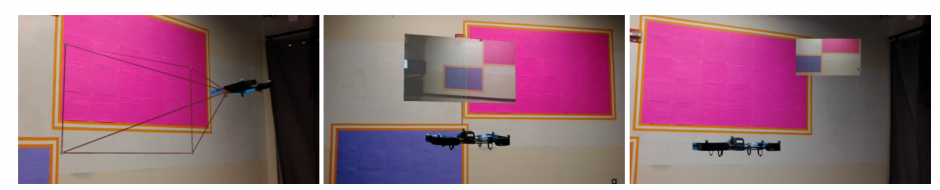
フィードバック方法は3つあります。ドローンがどの範囲を見ているかを仮想錐台で表したもの(Frustum)、見えている景色をARイメージとして本体連動で上に表示しているもの(Callout)、ディスプレイをHMD側に固定し表示しているもの(Peripheral)です。
実験では、ドローンにParrot Bebop、HMDにMicrosoft HoloLensが使用されます。ARイメージは、Unityで実装され、また、FrustumとCalloutは、ドローンと連動しているため、モーショントラッキングカメラを用いてドローンの位置をリアルタイムに把握します。
これらのことで、ドローン操作において、ユーザの視線内にすべての情報が表示され、ドローンから視線を外してモニタなどの第2の画面を見ることなく直感的に操作できるようになります。48人を対象に実験した結果、遠隔操作のパフォーマンスが向上し、クラッシュが減少しました。