チューリッヒ大学とNCCR(National Centre of Competence in Research)の研究者らは、車や自転車を模倣するように歩行者や障害物を回避したりする自律飛行ドローン(UAV)を構築できる機械学習システム「DroNet」を発表しました。
論文:DroNet: Learning to Fly by Driving
著者:Antonio Loquercio, Ana I. Maqueda, Carlos R. del-Blanco, Davide Scaramuzza

本稿は、操舵角と衝突確率を予測することにより、都市環境で安全な飛行を行うことができるCNN(Convolutional Neural Network)アーキテクチャを提案します。
提案手法は、車や自転車で収集したデータセットを基に、他の歩行者や障害物を安全に避けるなど、基本的な交通ルールに従うように学習します。UAVから制御するデータセットを収集することはコストが高いため、車や自転車から収集するアプローチは効率的と言えます。
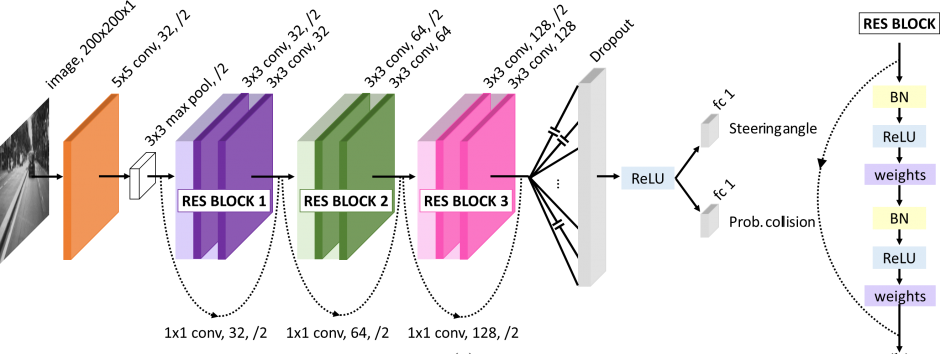
(操舵角と衝突確率を予測するアーキテクチャ)
このことで、衝突確率と適切な操舵角を同時に予測し、UAVが予期せぬ事象や障害物に迅速に対応することが可能になります。また、本システムは、屋外だけでなく屋内に適応することも可能で、建物内の廊下や駐車場でも自律的に飛行することを可能にします。
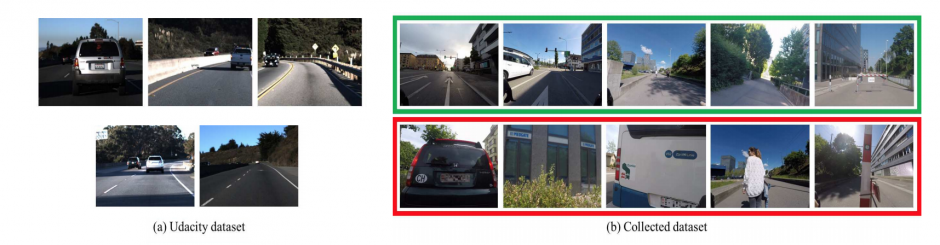
(a:は舵角を学習するために使用される画像。b:衝突の確率を知るために収集された画像。緑フレームが衝突なしで、赤フレームが衝突あり。)
コードとデータセットもGitHubにて公開されています。
映像では、ドローンが車道を飛行する様子や、障害物に当たらず止まる様子、目の前に自転車が出てきた時にも止まる様子、その他にも室内廊下や室内駐車場を飛行する様子を確認することができます。

関連
ミュンヘン工科大学の「Computer Vision Group」、RealSense搭載ドローンによる障害物をリアルタイムに3Dマップし回避する軌道再構成方法の映像を公開 | Seamless