MIT Media LabのCamera Culture groupは、深度を測定する精度を1,000倍に向上させるToF(Time of Flight)式デプスセンサを用いた新たなイメージングシステムを発表しました。
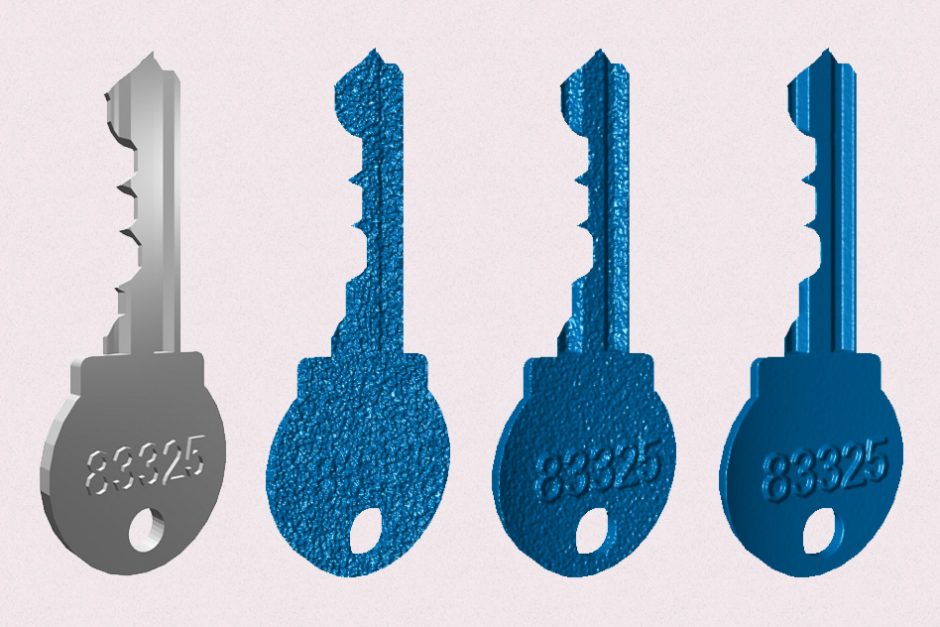
(左から順に、元の画像、Kinectスタイルのアプローチ、GHzアプローチ、より強力なGHzアプローチ)
ToF方式とは、物体との距離を測定する技術で、光源から発した光が物体に反射して受光するまでの時間を測定し距離を算出する手法です。中でもレーザー光をパルス状に照射する「LIDAR(Light Detection and Ranging)」を用います。
しかし、既存のToF式深度センサは、測定範囲を広げると測定が曖昧になり解像度が急激に低下し、霧などの悪天候でも精度は低下します。そんな中で、今回発表されたアプローチでは、より高い解像度を可能にします。
それは、LIDARと干渉法を組み合わせることで実現します。干渉法とは、発射した光線を2つ以上に分解し、別々の光路を通ったあと再び重ね合わせ、波長や位相差を測定する技術のことです。
LIDARは、光線がセンサに戻るまでの時間を計測することで距離を測定します。干渉計では光源を2つに分解し、その半分を局所的に循環させ、その半分を視覚的シーンに発射し、反射された光線は局部的に循環された光と再結合し、2つの光線の間の位相差を測定することで、光線の移動した距離の正確な測定値を取得します。使用される周波数は、ギガヘルツ (GHz) の高周波光です。
この組み合わせアプローチにより、深度分解能を1000倍正確にしたと述べており、より広範囲測定が可能になり、近くの測定はより高画質に捉えることができるとしています。
また、このことで、例えば自動運転車やその他ロボットにおける周囲の物体を検出する能力を向上させることができるほか、霧環境で測定する問題も解決できると述べます。
関連
カーネギーメロン大学等、屋外において太陽の日光下でも正確に奥行きを測定する新ToF方式深度カメラ「EpiToF」を論文で発表。複数センサーでの干渉なし、モーションブラーも回避 | Seamless