MITとチューリッヒ工科大学の研究者は、無人飛行ロボット(ドローン)を使用した空中撮影において、設定した被写体に対して常に良いショットを撮ることができる追跡型自律ロボット・システムの提案を論文にて公開しました。
オペレータは、被写体になる動的オブジェクトがフレーム内にあるべき場所、どの程度大きく表示されるべきか、アングル、スクリーンポジションなど、環境内の障害を考慮して指定することができます。
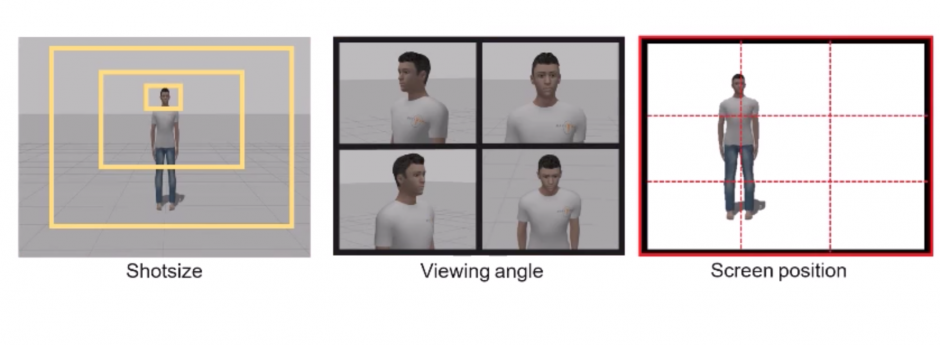
指定すると、ドローンは適切な飛行経路を単独で計算しリアルタイム軌道生成、さまざまな要因を互いに比較し、それに従った毎回最良のショットを追跡し撮ることを可能にします。
また、複数人がいたとしても指定した人のみ、被写体とカメラの間の動的障害物も回避し、単一のターゲットのみをトラッキングし撮影を続けます。
関連
ミュンヘン工科大学の「Computer Vision Group」、RealSense搭載ドローンによる障害物をリアルタイムに3Dマップし回避する軌道再構成方法の映像を公開 | Seamless