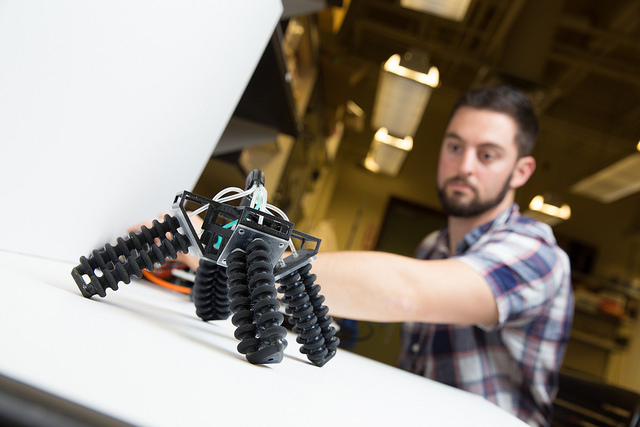
カリフォルニア大学サンディエゴ校のエンジニアのチームは、砂や小石などの粗い表面も歩くことができる3Dプリントされた4足歩行ソフトロボットを開発しました。
障害物を乗り越えてさまざまな地形を歩くことができます。
構成要素内で柔らかい材料と剛性のある材料を一緒に3Dプリントすることを可能にするハイエンドプリンタのおかげで、より複雑なロボットの形状を設計することができました。
柔らかく剛性の高い素材を組み合わせることで、先代モデルよりも適応性が高く、人間と安全に並行して作業ができ、また、金型に頼るのではなく、3Dプリンタによるロボットでは、はるかに安価で速いというメリットも付与されます。
現在のプロトタイプは、オープンソースボードとエアポンプに繋がれていますが、ロボットが独立して歩くことができるように、ボードとポンプの両方の小型化に取り組んでいるとのことです。
関連
米コーネル大学、柔らかさも検出するソフトタッチ可能な触覚ロボットハンド「Gentle Bot」を開発、論文を公開。完熟トマトも識別できる | Seamless