本ページは、ロボット(Robot)、ロボティクス(Robotics)、ドローン(Drone)、3Dプリンターなどに関する最新論文を厳選し、時系列順に随時更新、一覧にしている場所です。
また、本ページのようにアーカイブベースではなく、速報ベースで取得したい方は、月1回の配信で最新論文を紹介するWebコンテンツもあります。
初めての方はこちら。
索引
索引として「A~Z」順に並べています。 索引を飛ばす場合はこちら。
A
- A Comprehensive Realization of Robot Skin: Sensors, Sensing, Control, and Applications
- Adaptive locomotion of artificial microswimmers
- Additive Manufacturing of Sub-Micron to Sub-mm Metal Structures with Hollow AFM Cantilevers
- Addressable wireless actuation for multijoint folding robots and devices
- Aerial Path Planning for Urban Scene Reconstruction:A Continuous Optimization Method and Benchmark
- A hierarchically patterned, bioinspired e-skin able to detect the direction of applied pressure for robotics
- An autonomous untethered fast soft robotic insect driven by low-voltage dielectric elastomer actuators
- An origami-inspired, self-locking robotic arm that can be folded flat
- Arque: Artificial Biomimicry-Inspired Tail for Extending Innate Body Functions
- Autonomic perspiration in 3D-printed hydrogel actuators
- Autonomous Reconstruction of Unknown Indoor Scenes Guided by Time-varying Tensor Fields
B
- BADGR: An Autonomous Self-Supervised Learning-Based Navigation System
- Bioinspired dual-morphing stretchable origami
- Bioinspired flexible microfluidic shear force sensor skin
C
- Computational abstractions for interactive design of robotic devices
- Computational Design of Telescoping Structures
- Control of Tendon-Driven Soft Foam Robot Hands
- Co-Limbs: An Intuitive Collaborative Control for Wearable Robotic Arms
- Custom Soft Robotic Gripper Sensor Skins for Haptic Object Visualization
D
- Dense Object Nets: Learning Dense VisualObject Descriptors By and For Robotic Manipulation
- Dynamic locomotion synchronization of bipedal robot and human operator via bilateral feedback teleoperation
E
F
- Fast Handovers with a Robot Character: Small Sensorimotor Delays Improve Perceived Qualities
- First-in-human evaluation of a hand-held automated venipuncture device for rapid venous blood draws
- FaSTraP: Fast and Safe Trajectory Planner for Flights in Unknown Environments
- Fusion: Full Body Surrogacy for Collaborative Communication
G
H
- High-Speed, Non-deformation Catching of a Marshmallow with High-speed Vision and Proximity Sensor
- How Fast is Too Fast? The Role of PerceptionLatency in High-Speed Sense and Avoid
I
- Improving Collocated Robot Teleoperation with Augmented Reality
- Insect-scale fast moving and ultrarobust soft robot
- Interactive Robogami: Data-Driven Design for 3D Print and Fold Robots with Ground Locomotion
J
K
L
- Learning to Collaborate from Simulation for Robot-Assisted Dressing
- Learning to Film from Professional Human Motion Videos
- Life Signs Detector Using a Drone in Disaster Zones
M
- Manipulation by Feel: Touch-Based Control with Deep Predictive Models
- M-Blocks 2.0: Self-assembling Modular Robots
- MobiLimb: Augmenting Mobile Devices with a Robotic Limb
N
O
- Ondulé: Designing and Controlling 3D Printable Springs
- Orochi: investigating requirements and expectations for multipurpose daily used supernumerary robotic limbs
P
- Perching and resting—A paradigm for UAV maneuvering with modularized landing gears
- Programmable active kirigami metasheets with more freedom of actuation
Q
R
- Real-Time Motion Planning for Aerial Videography With Dynamic Obstacle Avoidance and Viewpoint Optimization
- Real-Time Planning with Multi-Fidelity Models for Agile Flights in Unknown Environments
- Real-Time Trajectory Replanning for MAVs using Uniform B-splines and a 3D Circular Buffer
- Robotic Assembly of Haptic Proxy Objects for Tangible Interaction and Virtual Reality
- Robotic metamorphosis by origami exoskeletons
S
- Socially Aware Motion Planning with Deep Reinforcement Learning
- Soft material for soft actuators
- Soft Somatosensitive Actuators via Embedded 3D Printing
- ShapeBots: Shape-changing Swarm Robots
- Snapbot: A Reconfigurable Legged Robot
- SwarmCloak: Landing of a Swarm of Nano-Quadrotors on Human Arms
- Swarm of tiny drones explores unknown environments
T
- Third-Person Piloting: Increasing Situational Awareness using a Spatially Coupled Second Drone
- Towards Robotic Feeding: Role of Haptics in Fork-Based Food Manipulation
- Tuna robotics: A high-frequency experimental platform exploring the performance space of swimming fishes
U
V
W
X
Y
Z
ロボット、ドローンの最新研究一覧
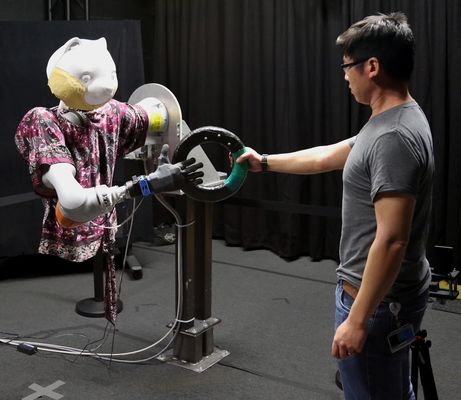
Learning to Collaborate from Simulation for Robot-Assisted Dressing
患者の着替えを支援するロボットの研究。上着を手から通し着せる動きをロボットアームで再現する強化学習モデルを構築。対象者の筋力低下、不随意運動など変動もパラメータ化し特定の障害がある人に対しても最適化したモデルに仕上げる。動画

Orochi: investigating requirements and expectations for multipurpose daily used supernumerary robotic limbs
体に巻き付け2本の腕のように使用するロボット。重量は1.4kg、全長2.4m、25自由度で動作、持てる重さ最大1kg。スマートフォンやコップを保持、重たい荷物を補助、ボタン操作等で使用。動画
Autonomic perspiration in 3D-printed hydrogel actuators
発汗で温度調整するソフトロボットの研究。30度以上で発汗し30秒以内に21度に低下。ファンよりも約6倍、人より約3倍速い。温度応答性ポリマーPolyやヒドロゲル材料等で構成。動画

BADGR: An Autonomous Self-Supervised Learning-Based Navigation System
目的の目標に向かって衝突のない経路を計画する移動ロボットの研究。シミュレーションや人間の監督なしに、現実世界の環境で収集したデータで訓練するエンドツーエンドの学習ベースのロボットナビゲーションシステム。動画

First-in-human evaluation of a hand-held automated venipuncture device for rapid venous blood draws
血液サンプルを採取するロボットの研究。採血した31人の参加者の全体的な成功率は87%。静脈にアクセスしやすい25人の場合、成功率は97%。装置内には、静脈から血液を採取する超音波画像誘導システムが組み込まれている。
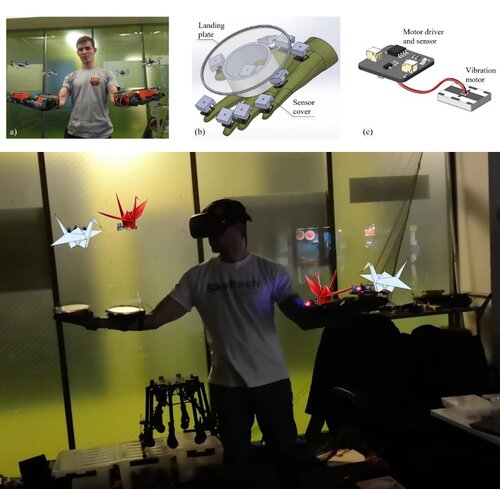
SwarmCloak: Landing of a Swarm of Nano-Quadrotors on Human Arms
人間の腕にドローンを着陸させる触覚システムの研究。手のひら用と前腕用のランディングパッド上に4台同時にドローンを着陸。ドローン下部のLEDアレイから放射する光を検出。振動による触覚提示で目隠しでの着陸も可能。動画
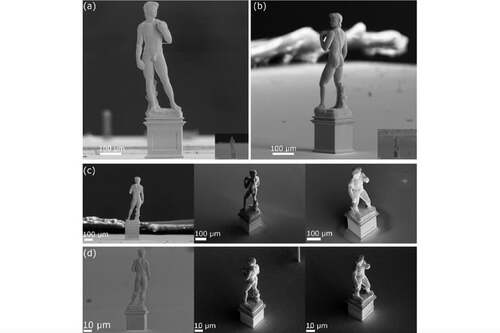
Additive Manufacturing of Sub-Micron to Sub-mm Metal Structures with Hollow AFM Cantilevers
高さ1ミリのダビデ像を精密3Dプリントする技術。CERESと呼ぶ3Dプリンター。1mの10億分の1の解像度、サイズ1~1000マイクロメートルの複雑な微小金属物体を室温で後処理せずに印刷。金、銀、銅、ニッケル、プラチナ等で出力可能。マイクロチップ、半導体、高周波アンテナ等への活用。動画

ShapeBots: Shape-changing Swarm Robots
形状を変え移動して群れる小型ロボットシステムを提案する研究。個別、集合で形状変化。各ロボット底部のマーカーを追跡。動的で物理的なアフォーダンスを提供。動画:各州の人口を高さで表現、CADデータのプレビュー、机上の掃除,飲める温度までコップを囲む等。動画

An autonomous untethered fast soft robotic insect driven by low-voltage dielectric elastomer actuators
ハエたたきでも壊れない昆虫ロボ「DEAnsect」を提案する研究。全長4cm,重量1g,ワイヤレスロボット。叩かれても壊れない。軟らかい人工筋肉搭載の3本の脚で伸縮(毎秒400回以上電圧をオン/オフ)し毎秒3cmで前進。白黒を認識するため地面の線をたどれる。動画
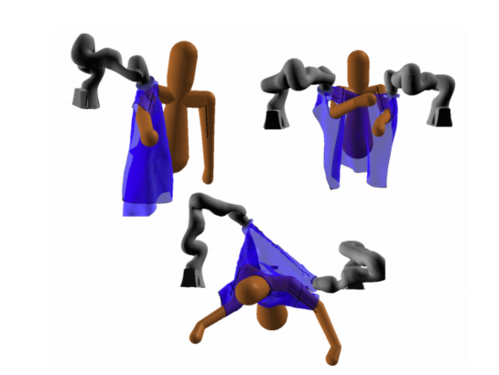
Bioinspired dual-morphing stretchable origami
深海魚から発想を得て、折り畳まれた状態から大きく膨らむソフトロボットを提案する研究。画像では3体の白いソフトロボットが膨らみ黒い獲物を捕獲する様子を確認できる。ミウラ折り等で折り畳まれた薄い状態から展開し10倍以上に膨れる。終われば元に戻る。グリッパーや歩行ロボットにも活用可能。動画
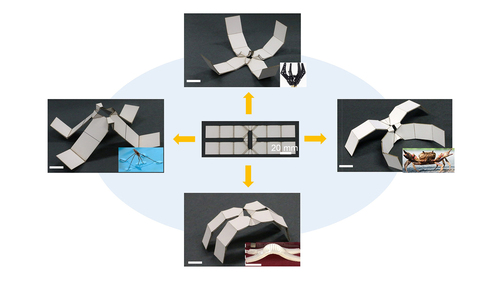
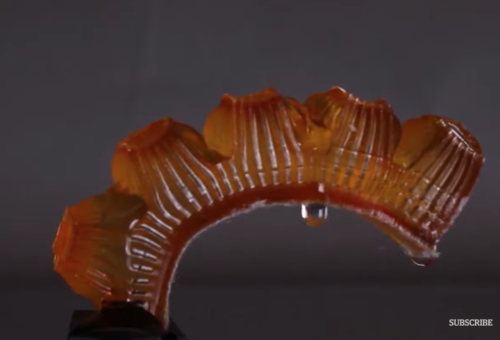
Programmable active kirigami metasheets with more freedom of actuation
1枚の紙を切り取って折りたたんで新しい形を作成する「 切り紙」にヒントを得た手法により、環境刺激に応じて新しい2次元/3次元構造に自動的に再構成されるソフトロボットを提案する研究。 熱に反応しない2つの外層と、熱に反応し収縮する中央のポリマー層で構成される。動画
Fast Handovers with a Robot Character: Small Sensorimotor Delays Improve Perceived Qualities
人からロボットへモノを手渡すと、自然な動作で受け取れるシステムを提案する研究。相手の手渡す動きを検出し、予想される手渡し位置にベジエ曲線を用い移動し受け取る。人間側がフェイントにも対応。動画
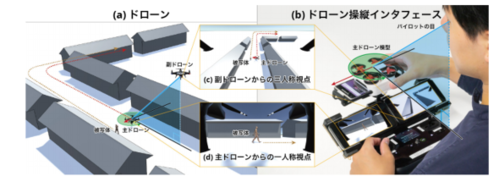
Third-Person Piloting: Increasing Situational Awareness using a Spatially Coupled Second Drone
飛行中のドローンを別のドローンから撮影し、パイロットの操縦をサポートするシステム「Third-Person Piloting」を提案する研究。主ドローンの軌道上に副ドローンを飛ばし、三人称視点を加えることで操縦をサポート。動画
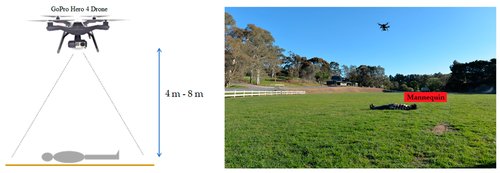
Life Signs Detector Using a Drone in Disaster Zones
災害時などにドローンとアクションカメラを使って要救助者の生死を判定する手法を提案する研究。上空からOpenPoseで胸部を特定し心肺運動から生死を判定。100%の精度。

Swarm of tiny drones explores unknown environments
未知の領域を6台の小型ドローンで探索する手法を提案する研究。未知の環境を複数の33g小型ドローンで自律探索するシステム。全体の地図を生成せず、目の前の障害物回避処理に専念する事で計算コストも低く低消費電力で済む、長時間探査が可能。実験では6台同時で6分以内に2人発見。動画
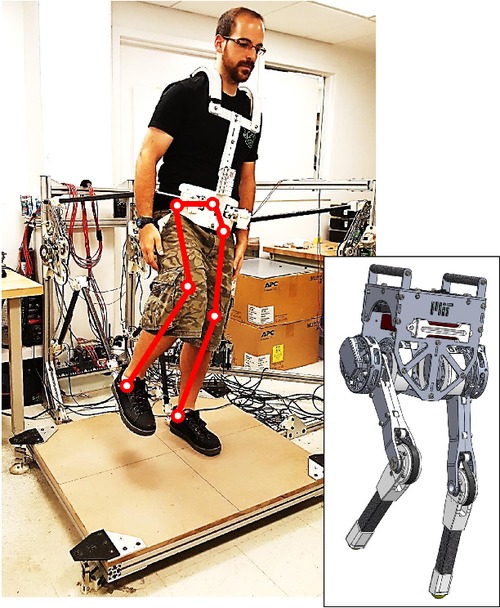
Dynamic locomotion synchronization of bipedal robot and human operator via bilateral feedback teleoperation
人間のバランス制御もリモートできる2足ロボットを提案する研究。胴体と2本の脚が備わったプロトタイプは、 人間の動きと地面の反力に関する情報をロボットに送信するベストを身に着けた人間のオペレーターによってリモート制御する。動画

M-Blocks 2.0: Self-assembling Modular Robots
群れで相互作用できるロボットキューブ「M-Blocks 2.0」を提案する研究。キューブの各面にあるバーコードのようなシステムを使用して互いに通信し識別する。自分で回転して動くだけでなく、空中を飛び回ったり、また複数のロボットキューブと連携することができ、お互いの上をよじ登ったり、上にジャンプしてを飛び乗ったり、つたって転がり落ちたりが可能。動画
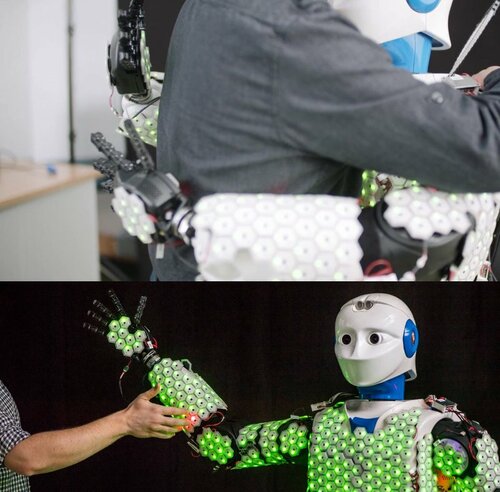
A Comprehensive Realization of Robot Skin: Sensors, Sensing, Control, and Applications
全身人工皮膚を備えた敏感なヒューマノイドロボットを提案する研究。上体、腕、脚、足の裏に1260個のセル(13000個以上のセンサー)を備え、外部からの接触をより高い感度で認識する。片足バランスや、人と安全にハグ(抱擁)が可能。動画
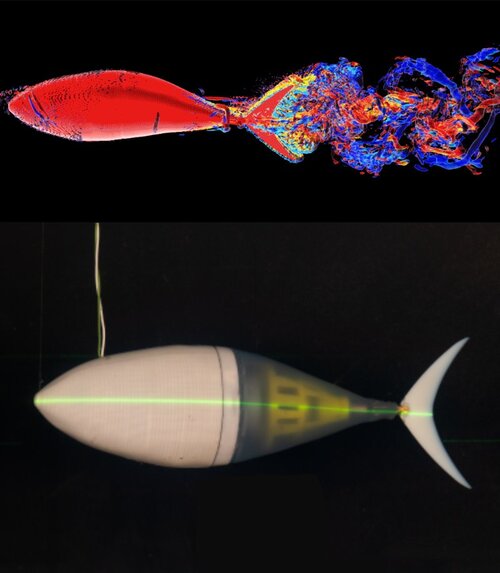
Tuna robotics: A high-frequency experimental platform exploring the performance space of swimming fishes
マグロのような動きと速度で泳ぐ魚ロボット「Tunabot」を提案する研究。キハダマグロの動きを模倣し、ほぼ同等の速度に達するのに十分なほど速く尾をたたくロボットを構築。動画
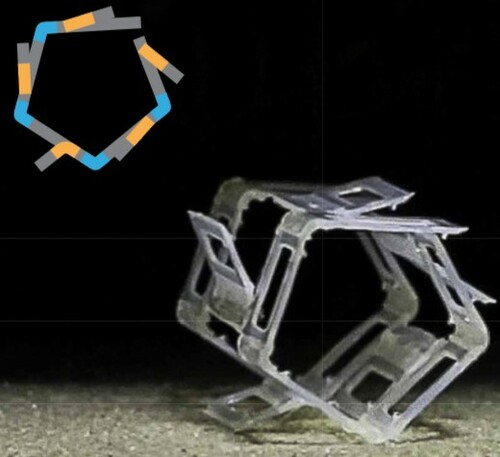
Untethered soft robotic matter with passive control of shape morphing and propulsion
温度変化で動く外部電源などに依存しない折り畳み式ソフトロボットを提案する研究。熱にさらされると形状が変化する液晶エラストマーを使用、異なる温度で折り畳みを制御するプログラムを構築。例えば、約200℃の表面に置くと関節が折り畳まれ、五角形のホイールにカールするプロトタイプなどを披露。動画
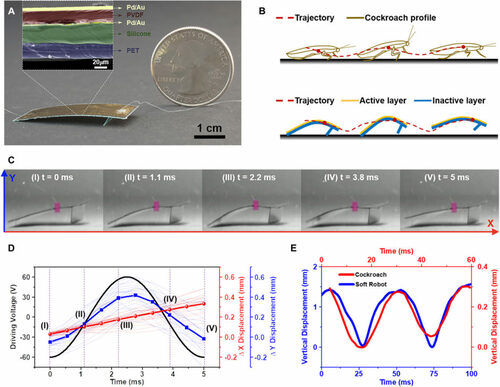
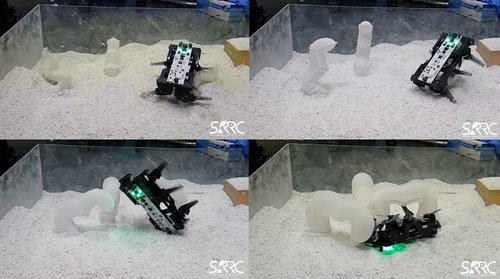
Insect-scale fast moving and ultrarobust soft robot
ゴキブリの身体能力を真似た小型ロボットを提案する研究。ポリフッ化ビニリデン(PVDF)という圧電素材の薄いシートで作られ、 全身を湾曲に曲げ、これを繰り返しながら移動する。毎秒、全長の20倍のスピード 。大人が踏んでも(約60kgの圧)壊れない。動画
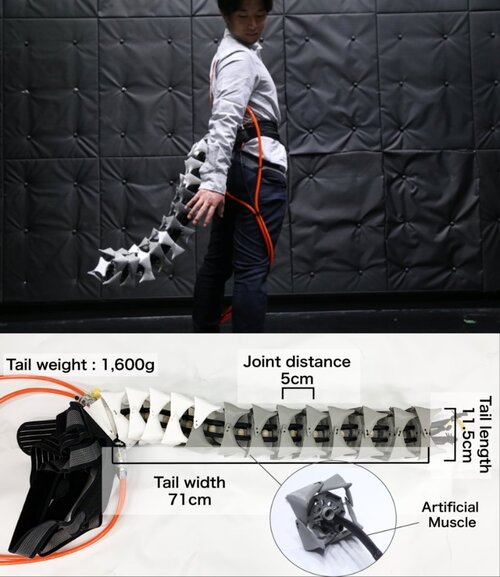
Arque: Artificial Biomimicry-Inspired Tail for Extending Innate Body Functions
脊椎動物の尻尾を模倣したウェアラブルロボットテールデバイス「Arque」を提案する研究。複数の関節部を互いに連結する構造で、各関節は4つのプレートとバネ、1つの椎骨で構成され、また4つの空気圧式人工筋肉アクチュエータを搭載。 8つの異なる方向に沿って尾部を制御。 前に屈むと後方に尾部が上がり、横に傾くと逆方向に尾部が上がり、これらの動きで全身運動のバランスをサポート。動画
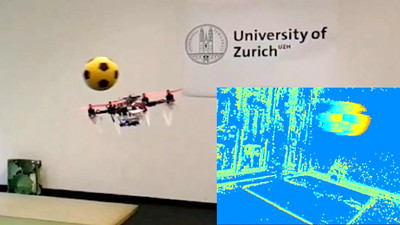
How Fast is Too Fast? The Role of PerceptionLatency in High-Speed Sense and Avoid
イベントカメラ搭載ドローンを用いて急に飛んでくる障害物(ボール等)を瞬時に避ける手法を提案する研究。イベントカメラとは、従来のカメラと違いピクセルレベルの輝度変化を出力する機器で、動きがある場合のみ検出する。実験では、飛んでくるボールを避けるのに成功。動画
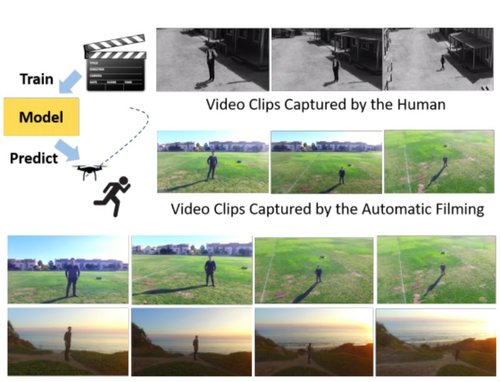
Learning to Film from Professional Human Motion Videos
プロの空撮を学習し模倣する自律型ドローン撮影システムを提案する研究。ドローンの空撮において、人間のモーションビデオをキャプチャするための被写体とカメラの動きを推定するフレームワーク。 被写体を真ん中に固定し追跡する映像ではなく、シネマティックにプロが空撮したかのような相対的な視点で映像を作成する。動画
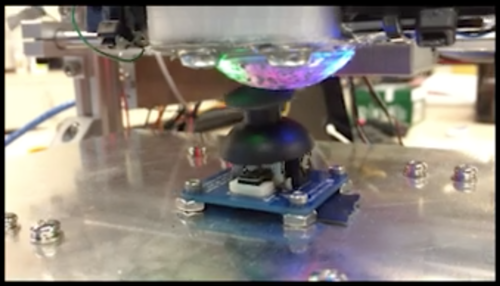
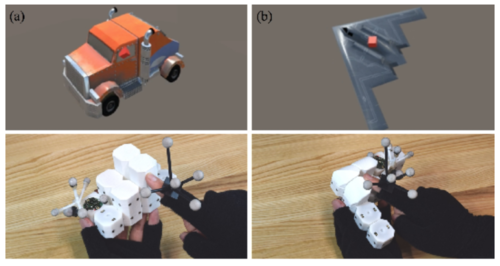
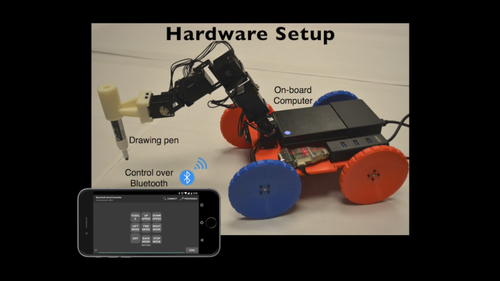
Manipulation by Feel: Touch-Based Control with Deep Predictive Models
触覚センサーとdeep learningを用いて、触覚を予測することでロボットの操作を制御するフレームワークを提案する研究。これにより、ジョイスティック操作や、ダイヤサイコロを手のひらで押し当てて転がすといった動作を可能にする。動画
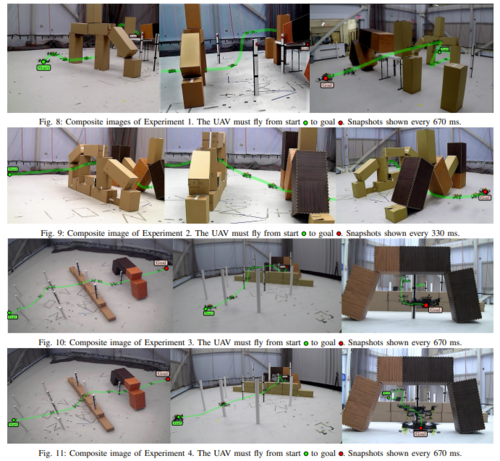
FaSTraP: Fast and Safe Trajectory Planner for Flights in Unknown Environments
未知の環境をドローンが衝突せず自律飛行するための高速で安全な軌道計画フレームワーク「FASTER」を提案する研究。 スタート地点からゴール地点まで障害物を回避しながらより高速かつ最短で飛行することを目指す。 ローカルとグローバルを計算し組み合わせることで経路を導く手法を採用。動画
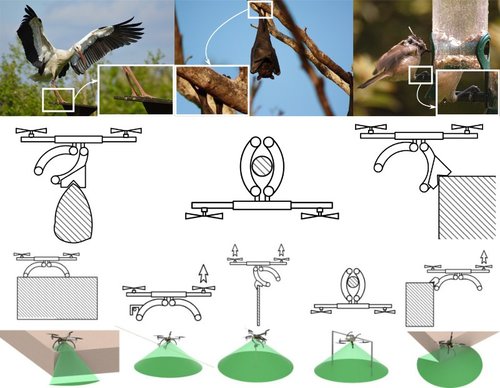
Perching and resting—A paradigm for UAV maneuvering with modularized landing gears
鳥やコウモリのように平らでない場所(木の枝や建物の端など)で止まって休息できる「かぎ爪」付きドローンシステムを提案する研究。かぎ爪モジュールを用いて、何かの端に止まったり、木の枝に捕まってぶら下がったり、何かの上に半ホバリングで留まったりを可能にする。動画

Towards Robotic Feeding: Role of Haptics in Fork-Based Food Manipulation
車椅子に取り付けて食事のサポートを行うロボットアームシステムを提案する研究。お皿に乗っている食べ物を見て識別し、その中からフォークを用いて目的の食物を串刺し、ユーザの口に届ける一連の動作を行う。ロボットの手首に搭載するカメラから物体検出を行い、指先の触覚力センサーで食品に適した角度と力を考慮し串刺す。動画

Generalization through Simulation:Integrating Simulated and Real Data into Deep Reinforcement Learning for Vision-Based Autonomous Flight
未知の廊下をドローンが(単眼カメラのみで)衝突回避しながら自律飛行できる機械学習を用いた手法を提案する研究。衝突回避ポリシーを訓練したドローンは、知らない廊下でも単眼カメラからの映像を駆使して自律飛行でき、様々な照明条件や複雑な廊下でも衝突回避しながらナビゲート可能。動画

Real-Time Planning with Multi-Fidelity Models for Agile Flights in Unknown Environments
未知の環境をドローンが模索しならが目的地を目指す自律飛行するためのリアルタイム・フレームワークを提案する研究。スタートからゴールまで、障害物を回避しながらより高速かつ最短で飛行することを目指す。グローバルとローカルを計算し組み合わせて最終的な経路を導きだす。動画
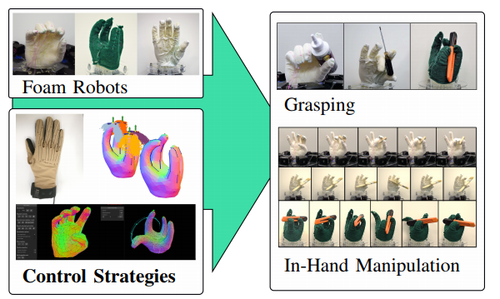
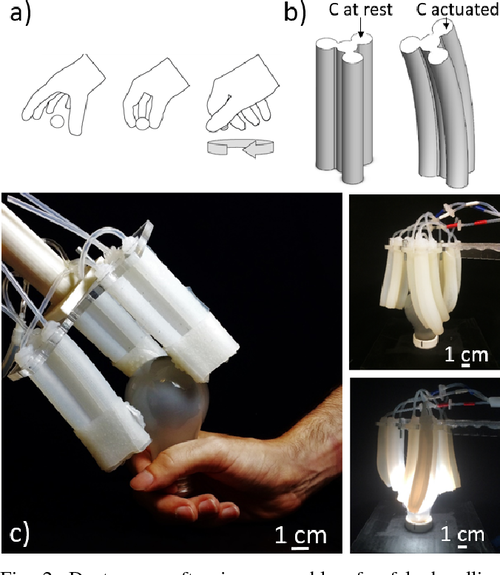
Control of Tendon-Driven Soft Foam Robot Hands
器用で柔らかいソフトロボットハンドシステムを提案する研究。手自体には腱(PTFEチューブを使用)の箇所含め柔らかい素材だけで作成し、すべての剛性部品(腱を駆動するためのモーターとプーリーなど)は手から離して収納。ボールを握ったり、ストローやお箸、ハサミなどを持って動かしたりと高精度に動かせる。動画

Adaptive locomotion of artificial microswimmers
血管内も通過する細菌をモデルにしたマイクロロボットを提案する研究。センサー、バッテリ、アクチュエータなどを詰め込むのではなく、周囲の電磁場の変化に反応する磁性ナノ粒子を組み込む。スピードや操作性を犠牲にすることなく、体液を泳いだりなど複雑な体内を通過できる。動画

Co-Limbs: An Intuitive Collaborative Control for Wearable Robotic Arms
直感的に操作できる背中装着型のウェアラブルロボットアームを提案する研究。背中に装着したロボットアームの手首には、手で握れるハンドヘルドツールが装備されており、これを動かすことでアームの位置を自在に決める。動画
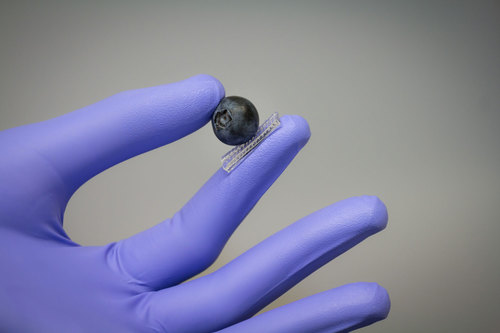
A hierarchically patterned, bioinspired e-skin able to detect the direction of applied pressure for robotics
ロボットハンドに触覚を与える人間の皮膚感覚を模倣した電子手袋を提案する研究。 電子手袋の指先の各センサは、有棘層のように凹凸構造にしたりなど3つの層で構成されており、圧力の強さと方向を同時に測定。ピンポン玉を押しつぶすことなく掴んで持ち上げること等を実証した。動画
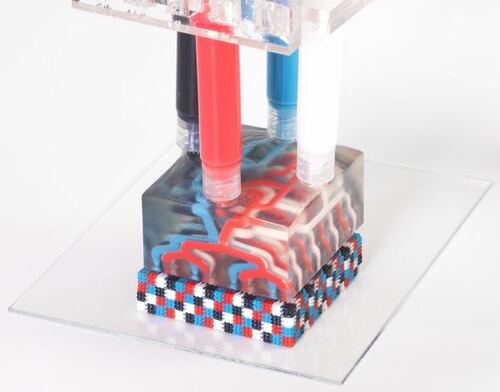
Voxelated soft matter via multimaterial multinozzle 3D printing
一連のY字接合部で複数インクを高速切り替えできる3Dプリンタ(8種のインクを毎秒50回切り替え可能)。従来の押出ベースの3Dプリンタより速い時間で生成可能な為、すぐ特性変化する素材や異なる素材を統合可能。動画冒頭、異なる剛性/柔軟素材を含む歩行ロボット。動画
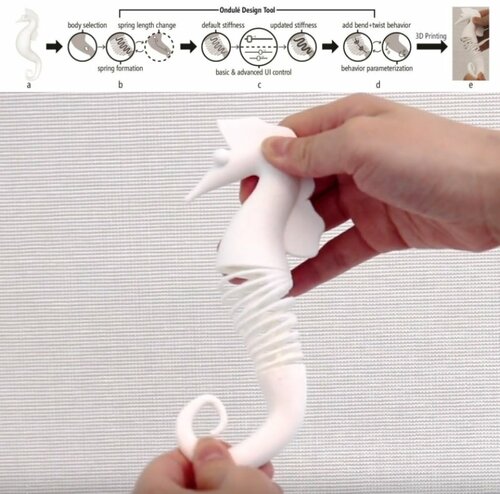
Ondulé: Designing and Controlling 3D Printable Springs
らせんバネと埋め込みジョイントを使用してバネをデザインする研究。ユーザーは、任意の形状からバネにしたい箇所を指定し、バネの能力(圧縮、拡張、ねじれ、曲げなど)をパラメーター化、変形を制御し、それに合ったオブジェクトを3Dプリンタを用いて印刷する。動画

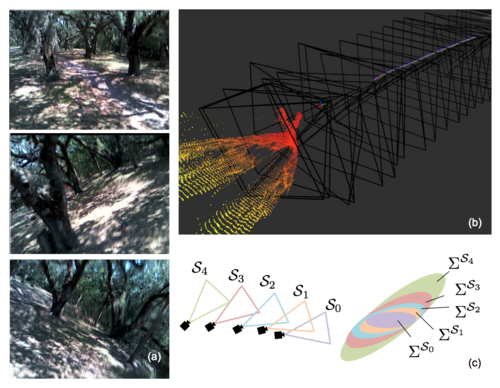
Aerial Path Planning for Urban Scene Reconstruction:A Continuous Optimization Method and Benchmark
ドローン(無人航空機:UAV)を用いて、大規模な都市などを効率的にキャプチャし3D再構築する手法を提案する研究。ビュー方向の探索と視点位置の最適化を組み合わせることで、最小限の飛行時間で、わずかな画像を使用してより正確で完全な再構成をもたらす。動画

MobiLimb: Augmenting Mobile Devices with a Robotic Limb
モバイルデバイスに装着し使用する指のような小型ロボット「MobiLimb」を提案する研究。170°回転できる5台のPZ-15320サーボモータが備わっており、スマートフォン(130g)の重量を支えるのに十分な力を生成したり、関節の動きを連続的に行う。動画
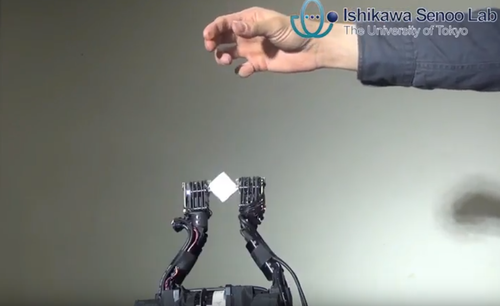
High-Speed, Non-deformation Catching of a Marshmallow with High-speed Vision and Proximity Sensor
柔軟物(マシュマロ等)を潰すことなくキャッチするロボティクス・システムを提案する研究。高速ビジョンセンサと高速・高精度近接覚センサを備えたセンサフュージョンシステムで、1msで物体の中心位置と距離を検出し、物体を潰したり(非変形)することなくキャッチできる。動画

Dense Object Nets: Learning Dense VisualObject Descriptors By and For Robotic Manipulation
新しい物体でも何を見ているか把握しピックアップできるニューラルネットワークを用いたロボットアームシステム「DON」を提案する研究。物体を種類(靴、マグカップ、帽子など)で分類するだけでなく、種類内の具体的な特定まで識別することが可能で、例えば、靴山の中から特定の靴をピックアップすることも可能。動画

Fusion: Full Body Surrogacy for Collaborative Communication
VRで遠隔操作されるロボットアーム2本と同じ物理空間で共同作業可能なVRテレコラボレーションシステムを提案する研究。追跡された頭を移動させながらカメラからの視覚情報をVRヘッドセットで確認し、2本のロボットアームをVRモーションコントローラでリアルタイムに遠隔操作できる。遠隔で操作する人の腕2本、装着者の腕2本、合わせて4本で共同作業がリアルタイムに可能。
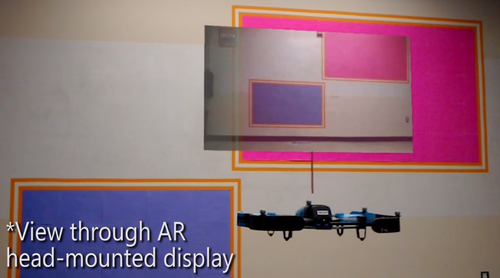
Improving Collocated Robot Teleoperation with Augmented Reality
ドローンから見える景色をARで可視化することで遠隔操作をサポートする研究。ドローンのカメラからキャプチャした視覚をHMDを通して視覚的なARフィードバックを提供する。動画

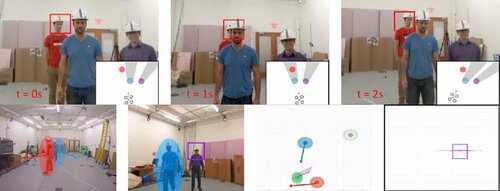
Eye in the Sky: Real-time Drone Surveillance System (DSS) for Violent Individuals Identification using ScatterNet Hybrid Deep Learning Network
群衆から暴力的な個人を検出するDeep Learningを用いたリアルタイム・ドローン監視システム「Drone Surveillance System(DSS)」を提案する研究。航空写真から人を検出し、人の姿勢推定を行い、推定された姿勢の手足の向きから暴力的な個人をリアルタイムで検出する。動画
NanoMap: Fast, Uncertainty-Aware Proximity Queries with
Lazy Search over Local 3D Data
障害物を回避しながら時速約32kmで自律飛行可能なドローンシステム「NanoMap」を提案する研究。自己位置推定のSLAM(Simultaneous Localization and Mapping)を使用せず、深度センサーを用いてリアルタイムに周囲を測定。動画
Soft Somatosensitive Actuators via Embedded 3D Printing
動き、圧力、接触、温度を感知できる埋め込みセンサーを備えたソフトロボットを作成できるプラットフォームを提案する研究。3本の指ソフトロボットが、オブジェクトに触れた時にボールの温度や圧力などを感知し容易に握れる。動画
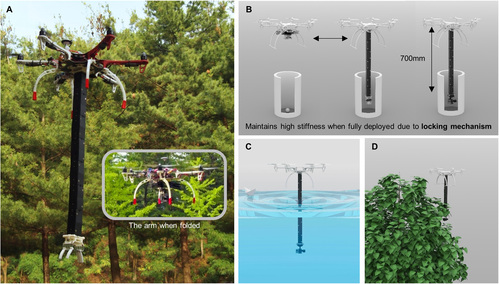
An origami-inspired, self-locking robotic arm that can be folded flat
ドローンなどに装着できる軽量で剛性の高い折りたたみ式ロボットアームを提案する研究。折り紙構造で、モーターでワイヤーを引っ張りフラットに折り畳んだり逆に張ったりできる。自身の17.5倍伸びる。自重の400倍以上12kg以上に耐える。動画

Kirigami skins make a simple soft actuator crawl
蛇に触発された切り紙を用いたソフトロボットを提案する研究。 レーザーカッターで切った素材は、風船のように膨張し収縮させるチューブ状のアクチュエータに巻きつけ、膨張と収縮を繰り返すことで蛇のように前進する。動画
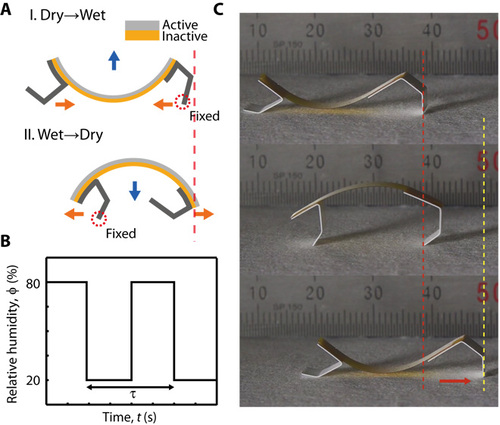
Hygrobot: A self-locomotive ratcheted actuator powered by environmental humidity
電源を必要とせず、周囲の環境から湿気(物や空気の中に含まれている水分)を吸収することにより動作するマイクロロボット「hygrobot」を提案する研究。吸湿層が水分を吸収し収縮し、乾いたら元に戻る繰り返しで移動する。動画

DroNet: Learning to Fly by Driving
車や自転車を模倣するように歩行者や障害物を回避したりするドローンを構築できる機械学習システムを提案する研究。衝突確率と適切な操舵角を同時に予測し、ドローンが予期せぬ事象や障害物を迅速に対応する。動画

Bioinspired flexible microfluidic shear force sensor skin
ロボットや人口器具などに巻きつけ触覚情報を伝えるのに役立つ伸び縮みする電子皮膚センサー「skin」を提案する研究。人の指と同様の触覚感度でせん断力を測定する。動画
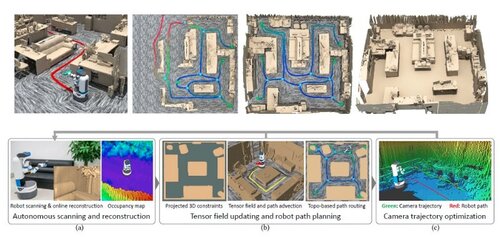
Autonomous Reconstruction of Unknown Indoor Scenes Guided by Time-varying Tensor Fields
RGB-Dカメラ搭載の移動式ロボットに未知の屋内を自律走行させる研究。移動式ロボットにRGB-Dカメラを取り付け、未知の屋内を連続的にスキャニングしオンライン再構成、自律的に走査させる。動画
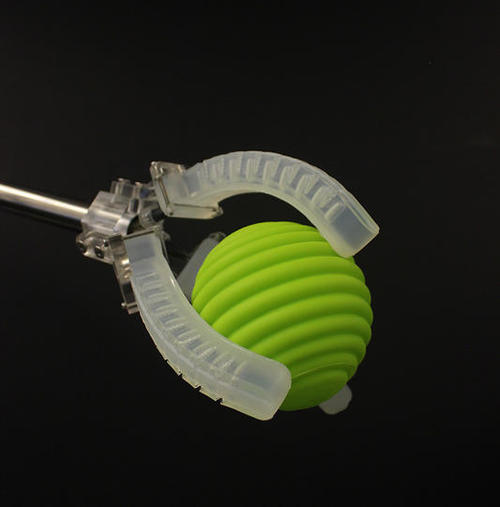
Custom Soft Robotic Gripper Sensor Skins for Haptic Object Visualization
3本の柔らかい指をネジって物体を掴んだり回したりするロボットグリッパーを提案する研究。指の表面にはオブジェクトを検出するために、導電性カーボンナノチューブで作られたセンサーが埋め込まれており、物体に触れた時に検知する。動画
Robotic Assembly of Haptic Proxy Objects for Tangible Interaction and Virtual Reality
複数の小型自走ロボットが引っ付き合いVR内の物体を再現することでユーザーに触覚体験を与える組立て式ロボットシステムを提案する研究。多数の自走小型ロボットがブロックのように引っ付き合いレゴのように作り出す。動画
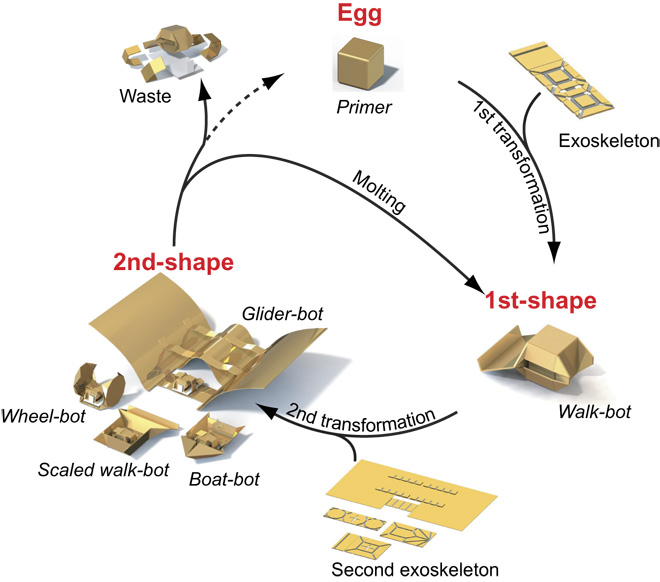
Robotic metamorphosis by origami exoskeletons
加熱で動作する折りたたみ式外骨格スーツを身にまとい能力強化するロボット「Primer」を提案する研究。小さなロボットは、折りたたみ式の外骨格を身にまとい、歩行、水上移動、飛行を可能にする。動画

Snapbot: A Reconfigurable Legged Robot
足を着脱できる再構成可能な歩行ロボット「Snapbot」を提案する研究。本体に1本〜6本の脚パーツを取り付け、各本数でそれぞれの動きをする。歩きながらでも着脱できる。動画
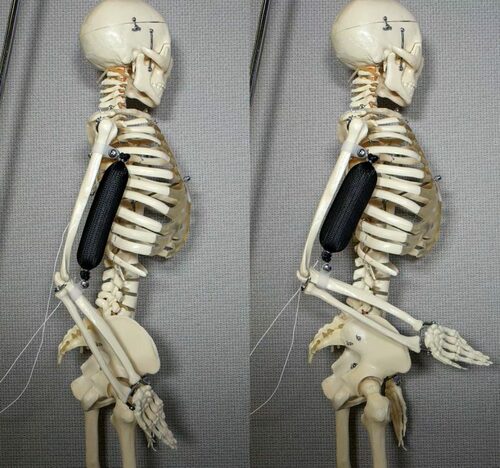
Soft material for soft actuators
自然の筋肉よりも3倍強く、外部圧縮機を必要としない3Dプリント可能な圧縮する柔らかい人工筋肉を提案する研究。自然の筋肉の15倍のひずみエネルギー密度を持ち、自重(物質自身の重さ)の1,000倍も持ち運べる。外部コンプレッサーまたは高電圧機器に依存することなく、細い抵抗線と8Vの低電力を用いて電気的に動かす。動画

Socially Aware Motion Planning with Deep Reinforcement Learning
人込みでも群衆を回避しながら走行するソーシャルドライブ可能な自律型ロボットを提案する研究。ウェブカメラ、深度センサー、光を用いて対象までの距離やその対象の性質を分析するLIDARセンサーなどが装備。自分がどこにいるのか、リアルタイムによる周囲の認識、目的地までのモーションプランニング、物理的に希望の経路を実行する制御、これらを実行し動作させる。動画

Computational Design of Telescoping Structures
伸縮を得意とする形状のロボット作成ができる設計ツールの研究。重なり合った筒が伸び縮みする構造「テレスコピック」をベースとしており、それぞれの筒が回転したり伸縮したりして多様に変形し、狭い場所の移動や困難な作業を可能にする。動画

Interactive Robogami: Data-Driven Design for 3D Print and Fold Robots with Ground Locomotion
設計から数時間でロボットを作成できる3Dプリンタと折り畳み手法を組み合わせたロボット作成システム「Interactive Robogami」を提案する研究。50以上の異なるボディ、車輪、脚、および周辺機器などのライブラリと、さまざまな動き(移動)の選択肢から選択し設計する。動画

Addressable wireless actuation for multijoint folding robots and devices
バッテリなしワイヤーなしのロボットを提案する研究。電磁力伝送によりワイヤレス制御する再現性のある運動が可能なバッテリレス折りたたみロボット。動画
Computational abstractions for interactive design of robotic devices
ドラッグ・アンド・ドロップでロボット設計できる初心者向けインタラクティブ・デザインツールを提案する研究。パーツには、アクチュエータ、ブラケット、タイヤ、3Dプリント可能なコンポーネントが用意されており、組み合わせるだけ。物理的にシミュレートされた環境でテストもできる。動画
Real-Time Motion Planning for Aerial Videography With Dynamic Obstacle Avoidance and Viewpoint Optimization
ドローンの空中撮影において、設定した被写体に対して常に良いショットを撮れる追跡型自律ロボット・システムを提案する研究。複数人いても指定した人のみ、被写体とカメラの間の動的障害物も回避し、ターゲットのみをトラッキングし撮影する。動画
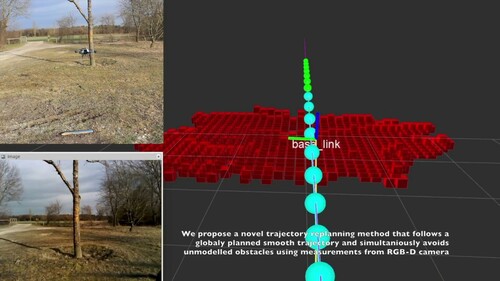
Real-Time Trajectory Replanning for MAVs using Uniform B-splines and a 3D Circular Buffer
深度センサーを搭載したドローンで、飛行中の周囲の環境(障害物)をリアルタイムに3Dマップして回避する軌道再構成方法を提案する研究。動画