中国科学技術大学の研究者らは、VRにおいて、狭い物理空間で大規模な仮想空間を歩行できる分割統治法を用いた新たなリダイレクト・ウォーキング「Smooth Assembled Mapping(SAM)」を論文にて発表しました。
Smooth Assembled Mappings for Large-Scale Real Walking
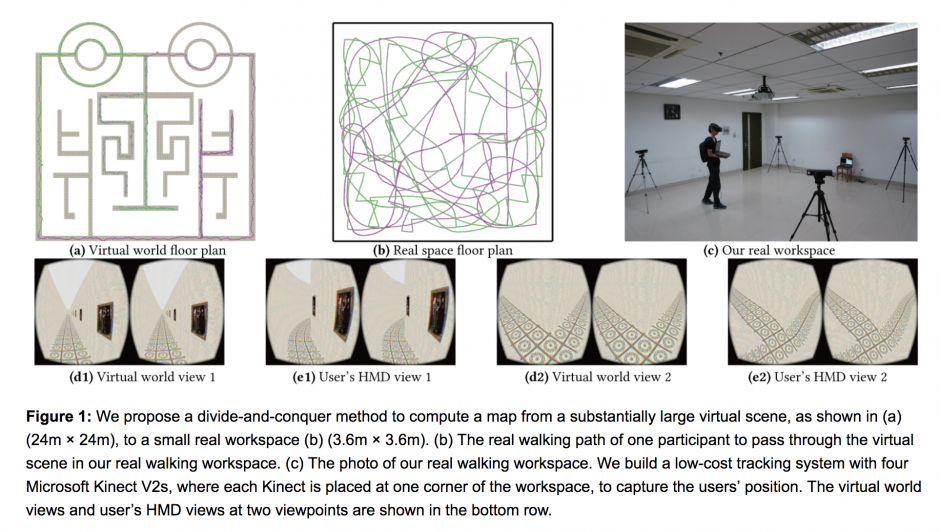
本稿は、VRをプレイする物理的なワークスペース(Real workspace、以下RW)において、それより広い仮想環境(Virtual environment、以下VE)を歩き回れることができる拡張技術を提案します。
過去の研究で、通路が連続するVR空間の平面図を物理世界の平面図に折り曲げて歪んだマップを生成する手法がありましたが、(過去記事参照)今回の提案はその改良版といったところです。

(左がVEで、右がRS。VEをRS内に折り曲げているのが確認できる。)
一方で、過去の研究では、全体を無理やり折り曲げて最適化するため、強烈な歪みが一部で発生しユーザを不快にするシーンがありました。既存ではその課題がありましたが、本提案では強烈な歪みはなくスムーズな折りたたみを実現します。

((c)が実際の仮想シーン、(d)が過去の手法を使用した時のユーザの見え方、(e)が本提案の見え方。本提案が歪みを低減しているのが確認できる。)
精度を向上させた方法としては、上記提案のようにVEとRWの間に全体を折り曲げたグローバルマップを作成するのではなく、分割して区分的なローカルマップを作成する分割統治法を採用したことにあります。
分割統治法とは、大きな問題を小さな問題に分割し、それぞれの問題を解決することで全体を解決する手法です。
分割統治法を採用した本提案では、VEの道を分割しそれぞれを最適化、統合し戻した全体も最適化するといったパイプラインで実行します。こうすることで、ユーザにとっての不快な歪みを軽減し、より精度の高いリダイレクト・ウォーキングを実現します。
実験では、RWの角にMicrosoft Kinect V2をそれぞれ4つ配置し、トラッキングシステムを構築、VE:3.6m×3.6m、RW:24m×24mと、約44倍のエリア拡張を実証しました。
関連
狭い物理空間で広いVR環境を歩行する「六角形」を基本とするリダイレクトウォーキング・アルゴリズムが登場 | Seamless