ソウル大学校の研究者らは、物理シミュレーションと機械学習を用いて、仮想の飛行生物が空気力学的に自ら動く方法を学習することができるコンピュータアルゴリズムを論文にて発表しました。
How to Train Your Dragon: Example-Guided Control of Flapping Flight
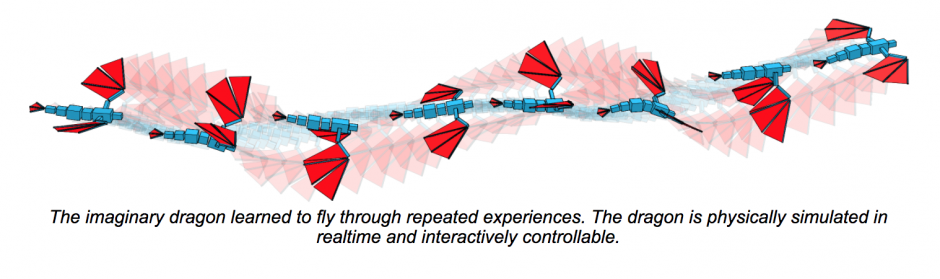
本稿では、自分の飛行法を習得する仮想飛行生物の自動制御技術を提案します。学習期間を経れば、急上昇、滑空、ホバリングなどの様々な運動スキルを身につけ、障害物にぶつからず自在に飛ぶことができるようになります。
機械学習では、Deep Q-Learning(DQL)が用いられ、障害物にぶつからず目標地点に到達すると報酬を受ける報酬システムを設計、また、Covariance Matrix Adaptation Evolution Strategy(CMA-ES)と結合することで、より短時間で、より品質を向上させる学習を可能にしました。
アルゴリズムは、様々な飛行生物に実験が行われ、どれも成功し、また、作成された動きに特殊効果を入れて映画やゲームのコンテンツの作成に役立つことができるということも実証しました。
このように、仮想飛行生物を空気力学的にモデリングすることは、実際に存在しないか、絶滅した生物の動きを推定し再現することもできるとしています。
関連
Disney Research、機械学習を用いて雲のシミュレーションを効率的かつ精密に再現する手法「Deep Scattering」を論文にて発表 | Seamless