深セン大学や国防科学技術大学などの研究者らは、RGB-Dカメラを取り付けた移動式ロボットを初めての屋内シーンで自律的に走行させる方法を提示した論文を発表しました。
Autonomous Reconstruction of Unknown Indoor Scenes Guided by Time-varying Tensor Fields
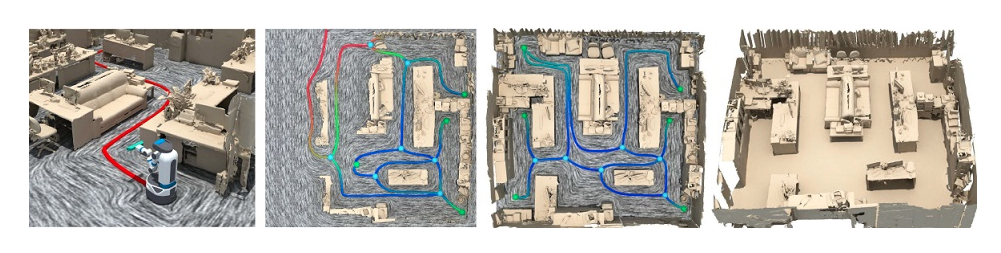
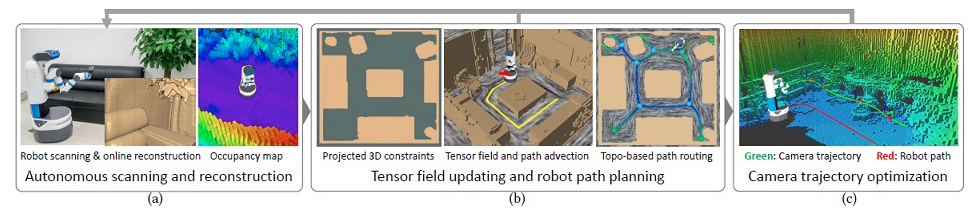
本稿では、移動式ロボットにRGB-Dカメラを取り付け、未知の屋内を連続的にスキャニングしオンライン再構成、自律的に走査させるナビゲーション手法を提案します。
提案では、RGB-Dカメラからデータを取得し、漸進的に再構成した3Dシーンジオメトリを床面に投影、2Dテンソル場を計算することでロボットの動きを導きます。
テンソル場は、再構成されたシーンに合わせてリアルタイムに更新されます。
デモ映像も公開されており、ロボットアームにカメラを取り付けて実験している様子、また後半では背が低い小型ロボットにカメラを搭載し実験している様子を確認することができます。

関連
MIT、人込みでも群衆を回避しながら走行するソーシャルドライブ可能な自律型ロボットを開発。強化学習による訓練で経路を1/10秒ごとに調整し毎秒1.2mで走行 | Seamless