総額22億ドル以上を資金調達している米国のARスタートアップ「Magic Leap」の研究者は、深層畳み込みニューラルネットワークによって駆動するSLAMトラッキング・アルゴリズム「Deep SLAM」について記述した論文を公開しました。
Toward Geometric Deep SLAM(PDF)
Magic Leapの研究者であるDaniel DeTone氏、Tomasz Malisiewicz氏、Andrew Rabinovich氏によって作成されたこの論文は、機械学習を使用し自己位置推定と環境地図作成を同時に行う「SLAM(Simultaneous Localization and Mapping)」による新たなトラッキング方法でパフォーマンスを向上させた内容を提案します。
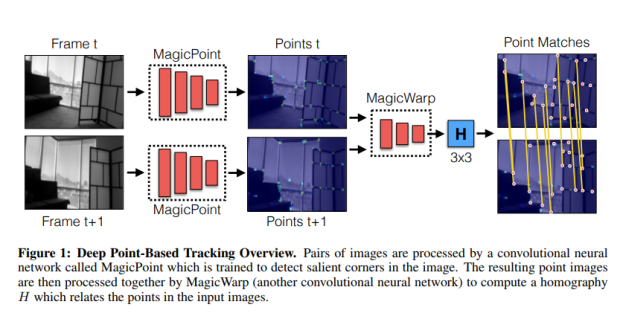
論文では、2つの深層畳み込みニューラルネットワーク(CNN)によって駆動される仕組みが提案されます。
1つは、単一画像内の顕著なコーナー(2Dポイント)をCNNで検出するよう訓練される「MagicPoint」と呼ばれるもの。2つ目は、ペア画像から抽出したポイントを別のCNNによって入力画像内の点を関連付けるホモグラフィを計算(推定)する「MagicWarp」と呼ばれるもの。
MagicWarpは、ローカルのポイント記述子を使用せず、ポイントの位置のみを使用するため、従来のアプローチと異なります。この2つはリアルタイムで実行することができ、その周りの世界をモデル化します。
ペーパー結論として、「Deep-Learningを搭載したSLAMシステムを大規模に展開する日は遠くないと考えている」と述べていることも含め、今後リリースしてくると思われるARグラスベースのプロダクトでの活用を意識しているものではないかと思われます。
関連
Google、Tangoでも使用の自分の位置と周囲の2D及び3Dの空間マッピングを同時にできる「SLAM」のオープンソースライブラリ「Cartographer」を発表 | Seamless