カリフォルニア大学サンディエゴ校の研究者は、柔らかい外骨格を装備するVR触覚フィードバック・グローブを発表しました。
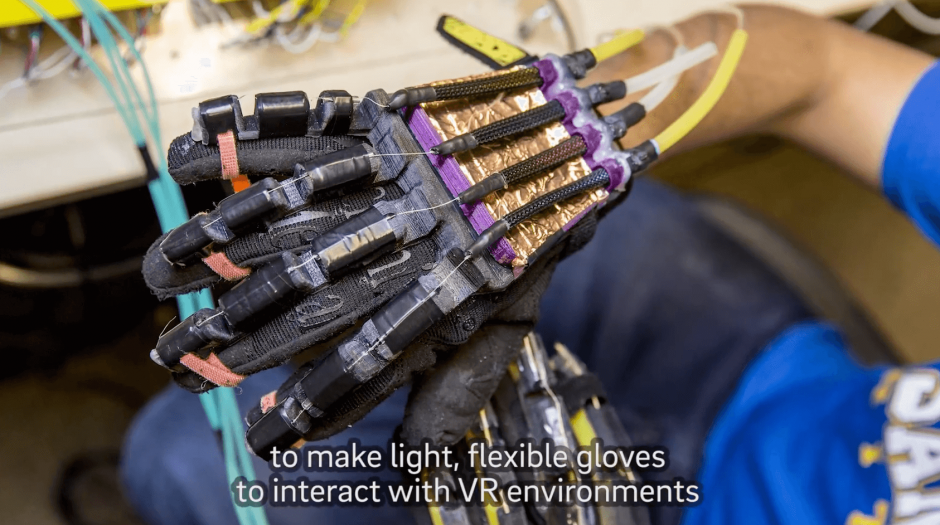
本システムは、ユーザーが仮想オブジェクトの表面に接触したときに振動などにより抵抗感を与えるデバイスです。ただ、従来のと違うのは金属のような重い材料で出来ていないことです。
シリコーンゴムや3Dプリントの雛形、関節にはベルクロストラップが埋め込まれており、さらに手袋の設計においての重要な要素の1つ「Mckibben muscle」と呼ぶロボット部品により柔らかい外骨格による柔らかいロボット筋肉が装備され出来ています。そのため、従来より軽くて使いやすくなったと。
デモ動画はこちら。
関連
カリフォルニア大学、砂や小石などの粗い表面も歩くことができる3Dプリントされた4足歩行ソフトロボットを開発 | Seamless