カリフォルニア大学バークレー校の「AUTOLAB」は、これまでに見たことのないオブジェクトを機械学習で把握し、そして掴み移動させるロボットアーム・ロボティクス・システム「Dex-Net」を発表しました。
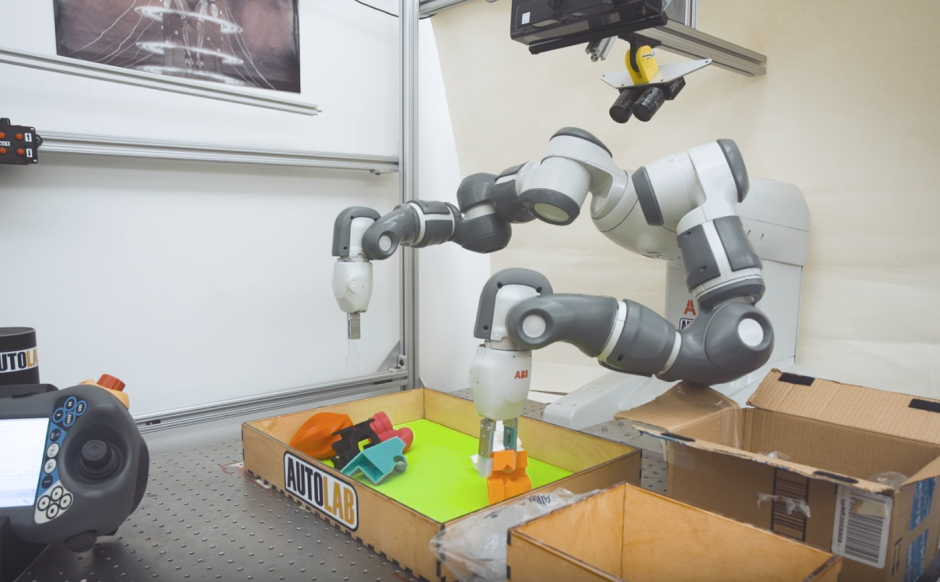
本システムは、オブジェクトを見て、その形状を理解し、それを過去に取り上げた他のオブジェクトと比較、その情報を使用してオブジェクトを取得する最良の方法を選択します。オブジェクトを見て、Deep Learningでその点群をメモリ内の点群と比較し、最も近いと思うものを選択します。

関連
イーロン・マスク氏等が設立した人工知能研究団体「OpenAI」、VRを使用してロボットにタスクを訓練させる新AIアルゴリズムを発表 | Seamless
アーカイブ