本日、Googleは、自分の位置と周囲の2D及び3Dの空間マッピングを同時にリアルタイムに行える「SLAM(Simultaneous Localization and Mapping)」のオープンソースライブラリ「Cartographer」を発表しました。
SLAMのアルゴリズムは、各種センサー(例えば LIDAR、IMU、カメラ)の位置とセンサー周辺のマップを同時に計算し結合、一貫性のある地図を生成します。ロボット掃除機、自動化されたフォークリフト、自動運転車、無人偵察機などの自律ロボットの重要なコンポーネントとして機能します。
Cartographerは、ロボット用OSフレームワーク「ROS (Robot Operating System)」のサポートおよび外部コントリビュータのおかげで、いくつかのロボットプラットフォームの準備ができています。
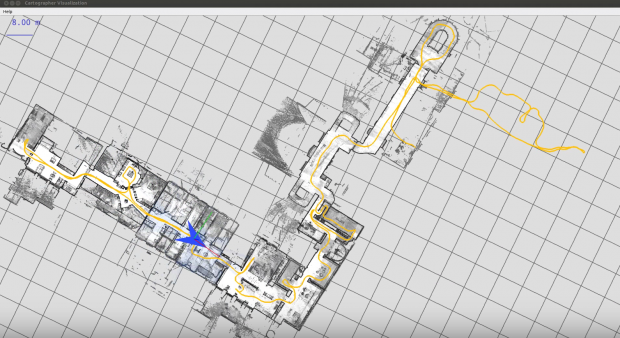
以下の映像は、Cartographerのデモンストレーションです。
CartographerのGitHubページはこちら。