ドイツ:ミュンヘン工科大学のComputer Vision Groupは、Google Tango搭載デバイスを使用し、リアルタイム空間認識においてオリジナルより強化した3Dマッピング技術を映像にて披露しました。
関わったのは、ミュンヘン工科大学:Computer Vision GroupのMaksym Dzitsiuk氏、Robert Maier氏、Lingni Ma氏、Daniel Cremers氏、そしてGoogleからJürgen Sturm氏です。
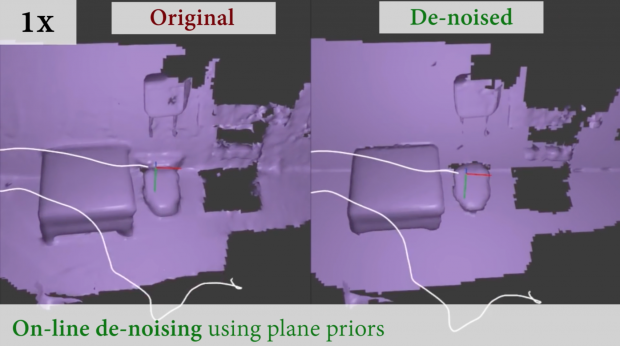
彼らのアルゴリズムは、「Plane Priors」を使用し、個別のメッシュ頂点の動きを抑え、クリーンで正確な表面を再構築し、カメラからの死角の穴も拡張し埋めます。映像では2つの比較実験で示します。
平らな表面を再構築する
1つ目は、テーブルの上に積み上げた正方形ブロック型3Dオブジェクトを置くという実験で、オリジナルでは傾いて倒れるのに対して、一方で倒れず直立するというものです。これにより、より平面に再構築したことを実証します。

(左ではブロックが倒れるのに対して、右では倒れず直立します。)
カメラからの死角の穴を埋める
2つ目は、特殊環境の中で壁にボール型3Dオブジェクトを当てた時の跳ね返り実験です。特殊環境とは、テーブルの下というカメラから見えない箇所があるという状態で、カメラから写らない箇所を拡張して再構築できるかという検証です。オリジナルではできないのに対して、一方で出来ると。映像では、ボールが跳ね返ってくる様子を確認できます。
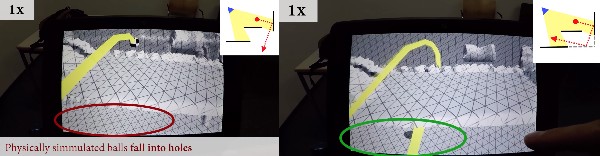
(左ではテーブルの下が認識できず穴に落ちて赤丸までボールが跳ね返ってこないのに対して、右では穴を埋める拡張が行われ緑丸までボールが跳ね返ってきます。)
動画最後では、部屋全体を比較した映像が映し出されます。
今回のアルゴリズムは、Google Tango搭載モバイルデバイスに実装し実行できるように最適化されているとのことです。映像はこちら。