Snapchat(現Snap)が2015年10月に提出したARに関する新たな特許出願が公開されました。
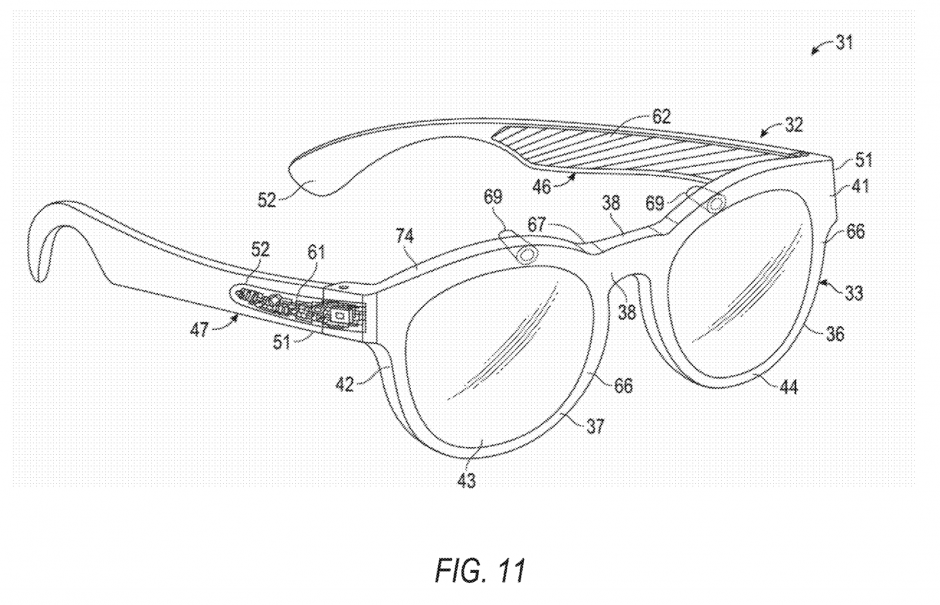
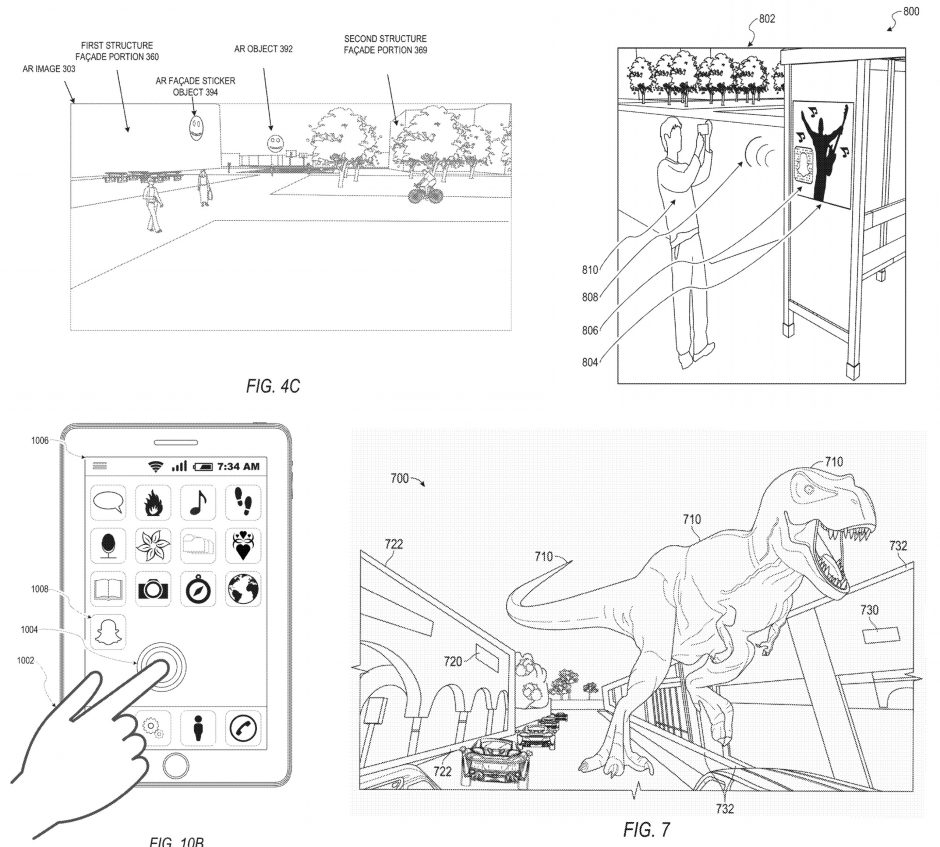
特許では、スマートフォンやメガネ型装置などの小型デバイスで使用する技術が記載されており、デバイスを通した現実空間にデジタル情報(ARオブジェクト)を重ね合わせる仕様が示されます。
また、位置推定のためのシステムおよび方法、ARオブジェクトデータの位置および遠近情報を決定しデバイスのディスプレイに出力するまでのプロセスが記載されます。
特徴的なのは、Google Tangoが使用している自己位置と周囲の3Dマッピングをリアルタイムに行う「SLAM(Simultaneous Localization and Mapping)」を使用していない点です。使用しないのは、プロセッサとメモリを大量に消費し小型デバイスに適さないからと。
そういった3次元点群モデルのアプローチではなく、「GPSなど位置ベースのシステムによる粗い位置推定値」と「カメラでキャプチャした複数画像のファサード(建物などの正面)2次元データモデル」に基づいて計算し位置を決定します。
このことで、プロセッサとメモリへの負荷が効率化され、モバイルデバイスまたはウェアラブルデバイスでの動作に適すものとしています。
特許はこちら。
関連
Facebook、独自ARプラットフォーム「Camera Effects Platform」のベータ版を発表。将来的にはメガネ型ARデバイスで使用 | Seamless